Diagnostica avanzata della rete elettrica di bordo degli autoveicoli
Nei moderni autoveicoli è necessario disporre di un sistema avanzato di gestione energetica in grado di soddisfare requisiti spesso in conflitto tra loro e di garantire che, nelle più svariate condizioni operative, la batteria sia in grado di fornire una quantità di energia sufficiente ad avviare il motore e possa essere usata come fonte di alimentazione passiva per alternatori intelligenti e sistemi start-stop
-

- Tweet
- Pin It
- Condividi per email
-
Il numero crescente di “elementi energivori” nonché l’introduzione di sistemi di accumulo di energia all’interno dei moderni autoveicoli, anche per motivi di sicurezza, hanno incrementato l’esigenza di una diagnostica affidabile della rete elettrica di bordo, che viene generalmente affidata al sistema di gestione della batteria, unitamente alla diagnostica della batteria stessa.
È necessario introdurre funzioni avanzate nel sensore batteria intelligente (IBS) per soddisfare nuove esigenze applicative come il bilanciamento del carico e la rilevazione della corrente di guasto. Il presente documento analizza numerosi casi che derivano da specifiche OEM relative alla rete elettrica di bordo e dalla rilevazione di condizioni standard concrete all’interno della rete stessa.
Questi casi sono implementati su un banco di prova per la rete di bordo ricorrendo a fini di diagnostica a un sistema di gestione della batteria basato su uno shunt. Per questa analisi è stato utilizzato un innovativo sensore batteria integrato con funzioni di comunicazione e di diagnostica avanzate.
Nell’articolo vengono presentati i risultati registrati sul banco di prova nonché i vantaggi pratici offerti dalle funzioni di diagnostica dell’IBS. Il banco di prova e il documento sono il frutto di un progetto di collaborazione tra Freescale e l’Università di Coburg in Germania.
Gran parte dell’innovazione in campo automobilistico è basata su componenti elettronici, per cui è necessaria una quantità sempre maggiore di energia per alimentare le numerose funzioni relative al confort, all’azionamento elettrico di elementi attinenti alla sicurezza, ai veicoli ibridi, all’assistenza al conducente e all’infotainment.
Alla situazione già critica della rete di bordo si aggiungono ulteriori problemi dovuti alla crescente domanda di energia elettrica e potenza, abbinata alla necessità di ridurre al tempo stesso le emissioni di CO2.
Storicamente il livello di carica della batteria di un’autovettura ha sempre rappresentato un’incognita che, in molti casi, ha provocato guasti al veicolo. In base al ciclo di vita del veicolo, il tasso di guasto legato alla batteria può raggiungere addirittura 10.000 ppm [1].
Queste esigenze crescenti aumentano anche il rischio di instabilità della rete di bordo e di improvvise cadute di tensione.
È quindi necessario disporre di un sistema avanzato di gestione energetica in grado di soddisfare questi requisiti in conflitto tra loro e di garantire che, nelle più svariate condizioni operative, la batteria sia in grado di fornire una quantità di energia sufficiente ad avviare il motore e possa essere usata come fonte di alimentazione passiva per alternatori intelligenti e sistemi start-stop.

Fig. 1 – Doppia rete di bordo 48V/12V standard, supportata dal sensore batteria Xtrinsic MM9Z1J638 di Freescale
La complessità del sistema di gestione energetica dipende dall’architettura della rete di bordo, che può essere relativamente semplice nel caso di una rete convenzionale 12V oppure estremamente complessa nel caso di un veicolo “mild hybrid” in presenza di un’architettura doppia dove coesistono, per esempio, reti di bordo 12V e 48V. Nella figura 1 è illustrato il principio di una rete di bordo di questo tipo.
Indipendentemente dal tipo e dal grado di complessità, l’energia disponibile all’interno della rete deve essere calcolata. I relativi algoritmi possono essere molto complessi per cui è necessario poter effettuare misurazioni rapide, estremamente precise e ricorrenti di tensione, corrente e temperatura della batteria.
Poiché generalmente gli algoritmi di gestione energetica vengono eseguiti all’interno di un Body Control Module centralizzato, bisogna disporre di una modalità di comunicazione veloce.
Devono essere rispettati anche i requisiti di sicurezza per cui si rendono necessarie misurazioni ridondanti di tensione, corrente e temperatura per poter effettuare le verifiche di plausibilità.
Sulla base di determinati comportamenti della rete di bordo gli OEM del settore automobilistico hanno definito requisiti che sono all’origine di test specifici relativi alla componentistica elettronica degli autoveicoli, per esempio [3][4].
Il sensore batteria è un elemento critico nella diagnostica avanzata della rete di bordo
Generalmente le soluzioni che utilizzano sensori batteria intelligente convenzionali non presentano il set di funzioni richieste, ovvero data rate veloci, un gran numero di canali di misurazione e gestione energetica avanzata per affrontare in modo efficace i problemi descritti in precedenza, per cui la distinta base che ne deriva può risultare estremamente complessa a causa della presenza di componenti esterni.
Freescale ha messo a punto una famiglia specifica di dispositivi altamente integrati per limitare la distinta base relativa a queste applicazioni: la famiglia di sensori batteria Xtrinsic MM9Z1J638.

Fig. 2 – Schema a blocchi semplificato della famiglia di sensori batteria Xtrinsic MM9Z1J638 di Freescale
I prodotti MM9Z1J638 sono dispositivi altamente integrati di monitoraggio della batteria. Nella figura 2 viene presentato uno schema a blocchi semplificato [2].
La famiglia di dispositivi MM9Z1J638 presenta gestione energetica avanzata e funzionalità MCU di precisione analogica mixed signal:
- Rilevazione della corrente
Un ADC SD a 16 bit (il valore in uscita è un “signed value” disponibile in un registro a 24 bit), è unito a un PGA con 4 guadagni diversi. La selezione del guadagno del PGA può essere effettuata dall’utente o in via automatica. L’utente può stabilire i guadagni utilizzati nella selezione automatica. Il valore convertito disponibile nel registro dei valori in uscita presenta un valore LSB fisso, indipendentemente dal guadagno selezionato.
- Rilevazione della tensione
Un ADC SD a 16 bit per la misurazione della tensione è collegato a un multiplexer e consente di selezionare quattro canali attenuati (VSENSE0 – VSENSE3) e cinque rilevatori diretti di tensione (PTB0 – PTB4). Gli ingressi PTB consentono quindi di utilizzare un “resistor divider” definito dall’utente e un intervallo di misurazione negativo. L’intervallo di tensione massimo specificato per i pin VSENSE0 – VSENSE2 è compreso tra -40V e 42V e la tensione di funzionamento può raggiungere rispettivamente 10V, 16V e 28V. L’intervallo di tensione massimo per VSENSE3 è compreso tra -40V e 62V mentre la tensione di funzionamento può raggiungere 52V. I dispositivi usati nel presente studio potevano funzionare anche a 56V ma oltre 52V la precisione risultava leggermente inferiore.
- Rilevazione della temperatura
Un ADC SD a 16 bit per la misurazione della temperatura è collegato all’uscita di un multiplexer e consente di selezionare il sensore della temperatura interna oppure i sensori della temperatura esterna attraverso il rilevatore diretto di tensione (PTB0 – PTB4).
- Funzione di gestione energetica
Un regolatore di tensione incorporato, con una tensione di funzionamento compresa tra 3,5V e 28V, alimenta il die del MCU e supporta un livello di corrente elevato (fino a 150mA) per alimentare, se del caso, componenti esterni come un transceiver CAN. Vari modi operativi avanzati, numerose modalità di wake-up e altre funzioni contribuiscono a ridurre efficacemente i consumi.
- Microcontrollore incorporato
Viene usata una CPU S12Z con indirizzamento lineare e ALU a 32 bit, 128kb di memoria flash, 4kb di EEPROM, 8kb di SRAM, il tutto on-chip con ECC, moltiplicatore di frequenza PLL (phase locked loop) con filtro interno, oscillatore di Pierce controllato dall’ampiezza 4 – 16 MHz, oscillatore RC interno 1,024 MHz e frequenza di bus fino a 50 MHz.
- Comunicazioni
Sono disponibili numerose opzioni di comunicazione: un modulo digitale CAN (msCAN), un modulo SCI (UART), un modulo PHY LIN 2.1 incorporato e un modulo SPI (serial peripheral interface).
Come descritto nell’esempio riportato nella figura 1, queste funzioni avanzate consentono a MM9Z1J638 di monitorare in modo rapido ed efficace la rete di bordo sia 12V che 48V e di trasmettere rapidamente i risultati al BCM/Energy Management Controller tramite il protocollo CAN. Inoltre il dispositivo è particolarmente adatto a supportare test relativi ai componenti elettronici degli autoveicoli.
Nei capitoli che seguono vengono descritti i test selezionati e i relativi risultati.
Selezione dei test
Sono stati scelti sei test diversi, i cui risultati sperimentali sono riportati nel presente documento. Quattro sono stati scelti sulla base dei test contenuti in [3] e [4], leggermente modificati per adattarli al contesto del presente studio mentre gli altri due test presentano contesti standard di applicazioni BMS. Riteniamo che la combinazione di questi test dia un’idea abbastanza precisa dei vantaggi offerti da una soluzione BMS basata su CAN per la diagnostica di reti di bordo di tipo 12V e 48V.
Test N. 1 – Rete di bordo 12V – Tempo di salita UB veloce da 0V a 12V
Questo test serve a stabilire il tempo minimo necessario a BMS tra il Power-On reset e la trasmissione lungo il bus CAN del messaggio CAN che contiene i primi campioni di tensione. Non è in relazione con alcuna specifica di rete di bordo.
Test N. 2 – Rete di bordo 12V – Wake-up dei nodi del bus
Questo test è basato su [3], 5.2.1.7.1 breve on/off dei nodi del bus. Viene testato il comportamento dei nodi del bus durante il wake-up del medesimo.
Test N. 3 – Rete di bordo 12V – Discesa lenta, salita rapida
Questo test è basato su [3], 5.2.1.3.2 discesa lenta/salita rapida di UB. In questo contesto viene descritto il collegamento di un dispositivo di avviamento ausiliare a una batteria scarica.
Test N. 4 – Rete di bordo 48V – Discesa lenta, salita lenta per funzionamento con accumulo
Questo test si basa su [4], E48-06 per il funzionamento con sistema di accumulo parte 2. Viene simulato il collegamento del generatore al sistema di accumulo scollegato e successivamente il collegamento di quest’ultimo. Per questo test si ipotizza che il sensore batteria intelligente sia alimentato dalla rete 12V e usato per la diagnostica della rete 48V.
Test N. 5 – Rete di bordo 48V – Recupero
In questo test, basato su [4], E48-04, vengono riprodotte le caratteristiche della tensione in fase di recupero dell’energia. Si ipotizza che il sensore batteria intelligente sia alimentato dalla rete 12V e usato per la diagnostica della rete 48V.
Test N. 6 – Rete di bordo 12V – Impulso di avviamento
Per questo test la scheda MM9Z1J638 è stata collegata alla batteria dell’autovettura e sono state registrate la corrente e la tensione di un impulso di avviamento.
Descrizione del banco di prova della rete di bordo
Per effettuare i test descritti nel capitolo 3 è necessario generare livelli di tensione variabili con valori superiori a 50V nonché generare un impulso per simulare un vuoto di tensione durante l’avviamento con corrente elevata. Vengono quindi utilizzati due diversi banchi di prova.
Banco di prova per le curve di tensione
Questo banco di prova è stato utilizzato per i test 1- 5.

Fig. 3 – Banco di prova per le curve di tensione
È composto da un generatore di funzione, da un amplificatore di potenza, da un oscilloscopio digitale a 4 canali, da una scheda di valutazione MM9Z1J638 e da un’interfaccia CAN-PC per registrare nel PC i dati CAN completi. La struttura di base della configurazione per la misurazione della tensione è riportata nella figura 3.
L’abbinamento di un generatore di funzione/forma d’onda arbitraria e di un amplificatore di potenza costituisce uno strumento potente per la generazione di una tensione con le caratteristiche desiderate.
La scheda di valutazione MM9Z1J638 è composta dal sensore batteria intelligente MM9Z1J638 [2], da un transceiver CAN [5], da un quarzo, dai componenti passivi necessari e da numerosi connettori per i canali di misurazione. In questo caso, per misurare la tensione è stato usato VSENSE3 in quanto l’intervallo di misurazione di questo pin abilita la misurazione nei test con la rete di bordo 48V. I campioni di tensione rilevati sono trasmessi via CAN il più rapidamente possibile alla velocità di 500 kbps.
Un’interfaccia PC per il generatore di forma d’onda e l’interfaccia CAN consentono un controllo completo del banco di prova e l’analisi automatica sul PC. L’oscilloscopio serviva a rilevare dettagli supplementari.
Banco di prova a bordo del veicolo
Questo banco di prova è stato usato per il test N. 6. La scheda MM9Z1J638 APP serve a misurare la tensione e la corrente di una batteria sulla rete 12V in un veicolo di prova mentre viene usata un’interfaccia CAN-PC per trasmettere al PC i dati rilevati dal sensore.
Presenta gli stessi componenti della scheda di valutazione con la differenza che, essendo montato su uno shunt, consente di misurare con precisione la corrente anche dalla parte negativa della batteria, per cui questa disposizione è molto simile all’applicazione IBS finale all’interno del veicolo. Viene utilizzata la stessa interfaccia CAN-PC dell’altro banco di prova.
Risultati sperimentali
Nel capitolo seguente sono riportati i risultati registrati nei sei test. I banchi di prova sono stati costruiti nell’università di Coburg in Germania.
Il sensore batteria intelligente effettua la misurazione alla massima velocità di campionamento possibile (8kHz) e viene utilizzata una configurazione a filtri standard che raggiunge un buon compromesso tra l’accuratezza del campione, le caratteristiche di frequenza e il tempo di campionamento. Non si ipotizzano ritardi lungo il bus CAN a causa di altri messaggi.
Rete di bordo 12V – Salita immediata VSUP

Fig. 4 – Ritardo tra il Power On e il primo messaggio CAN
In questo test viene analizzato il comportamento dell’IBS dopo il Power-On reset e la durata della sequenza di inizializzazione fino al primo messaggio CAN. Nella figura 4 sono riportati il test e i relativi risultati. Sono visibili la tensione della rete di bordo UB nonché l’uscita del regolatore di tensione VDDX (che serve ad alimentare la CPU e il transceiver CAN). Sono riportati anche CANH e CANL.
Il tempo di salita della tensione della rete di bordo è di circa 820us. Tra il superamento del limite inferiore della tensione di funzionamento a 3,5V e l’inizio della trasmissione sul bus del primo messaggio CAN valido è stato registrato un tempo di 3,65ms. Questo intervallo di tempo si compone principalmente del tempo di avvio del regolatore di tensione, del tempo di inizializzazione del sistema e di circa 1,6ms per l’acquisizione dal software del primo campione di misurazione. Per via dell’architettura sigma-delta degli ADC, è necessario tener conto del tempo di latenza legato al fattore di decimazione e ai filtri digitali configurabili integrati. È possibile ridurre ulteriormente il ritardo configurando i filtri in base al tempo di latenza minimo assoluto.
Test N. 2 – Rete di bordo 12V – Wake-up dei nodi del bus
In questo test viene osservato il comportamento del sensore batteria intelligente in fase di wake-up. Nella fase preparatoria del test il dispositivo MM91ZJ638 e il transceiver CAN si trovano nel modo standby/sleep. Dopo che CANH/CANL hanno provocato il wake-up del transceiver CAN, l’attività in corrispondenza dell’uscita CAN RX del transceiver induce il wake-up di MM9Z1J638. Un fronte discendente su CAN RX viene rilevato dal Pin PTB4, che esegue la funzione di wake-up.

Fig. 5 – Ritardo tra il wake-up e il primo messaggio CAN
In questo test il modo a basso consumo selezionato per MM9Z1J638 è il modo “sleep” che garantisce il consumo più basso di corrente base (generalmente 60uA) pur aumentando leggermente il tempo di avvio rispetto ad altri modi a basso consumo disponibili. La tensione di alimentazione è costante a 12V. Nella figura 5 sono riportati i risultati del test. E’ visibile l’uscita del regolatore di tensione VDDX (che serve ad alimentare la CPU e il transceiver CAN) per indicare la sequenza di wake-up del microcontrollore. L’ “Input di wakeup” è il segnale CAN RX collegato a PTB4. Sono riportati anche CANH e CANL.
Input di wake-up
Il tempo intercorso tra la prima modifica del livello di tensione di CANH/CANL fino all’ingresso nel bus del messaggio che contiene i primi risultati è stato misurato in 3,54ms. La durata è leggermente inferiore rispetto al tempo misurato dal Power-On (vedi test N. 1) per via del minor tempo di avvio di MM9Z1J638 quando esce dal modo “sleep”. Il tempo delle misurazione di tensione e corrente è identico a quello del test N. 1.
Test N. 3 – Rete di bordo 12V – Discesa lenta, salita rapida
Questo test illustra il comportamento del sensore batteria intelligente in presenza di una discesa lenta e di una salita rapida della tensione di alimentazione. Anche se la denominazione del test sembra indicare un incremento rapido, il tempo di salita della tensione superiore a 100ms è davvero lento per l’IBS.

Fig. 6 – Ritardo tra il Power-On e il primo messaggio CAN
Il risultato del test è riportato nella figura 6. Sono visibili la tensione della rete di bordo UB nonché l’alimentazione dell’uscita del regolatore di tensione VDDX (che serve ad alimentare la CPU e il transceiver CAN). Sono riportati anche CANH e CANL.
In questo test è stata misurata una durata di 23,2ms, influenzata dal tempo di salita della tensione di alimentazione. All’interno della figura 6 il cursore di sinistra indica il momento in cui il superamento del valore 3,2V da parte della tensione di alimentazione provoca un Power-On reset del dispositivo MM9Z1J638. Si tratta del livello di disattivazione (deassert) del reset di bassa tensione in presenza di una alimentazione 5V. Dopo l’avvio di VDDX entra in gioco il vettore Power-On reset, la CPU esegue le routine di avvio e vengono effettuate le misurazioni della tensione ma il primo messaggio CAN può fare il suo ingresso nel bus solo quando VDDX supera 4,06V, che equivale alla tensione di funzionamento minima del transceiver CAN in questo banco di prova.
Test N. 4 – Rete di bordo 48V – Discesa lenta, salita lenta nel funzionamento con accumulo
Nel test N. 4 viene simulato il collegamento del generatore al sistema di accumulo scollegato e successivamente il collegamento di quest’ultimo. Il sistema di diagnostica, ovvero l’IBS, deve essere in grado di rilevare la frequenza della tensione di alimentazione e di inviare con la massima rapidità i valori misurati ed eventuali segnalazioni di errore. Si ipotizza che il sensore batteria intelligente venga alimentato dalla rete 12V e che venga usato per la diagnostica della rete 48V.
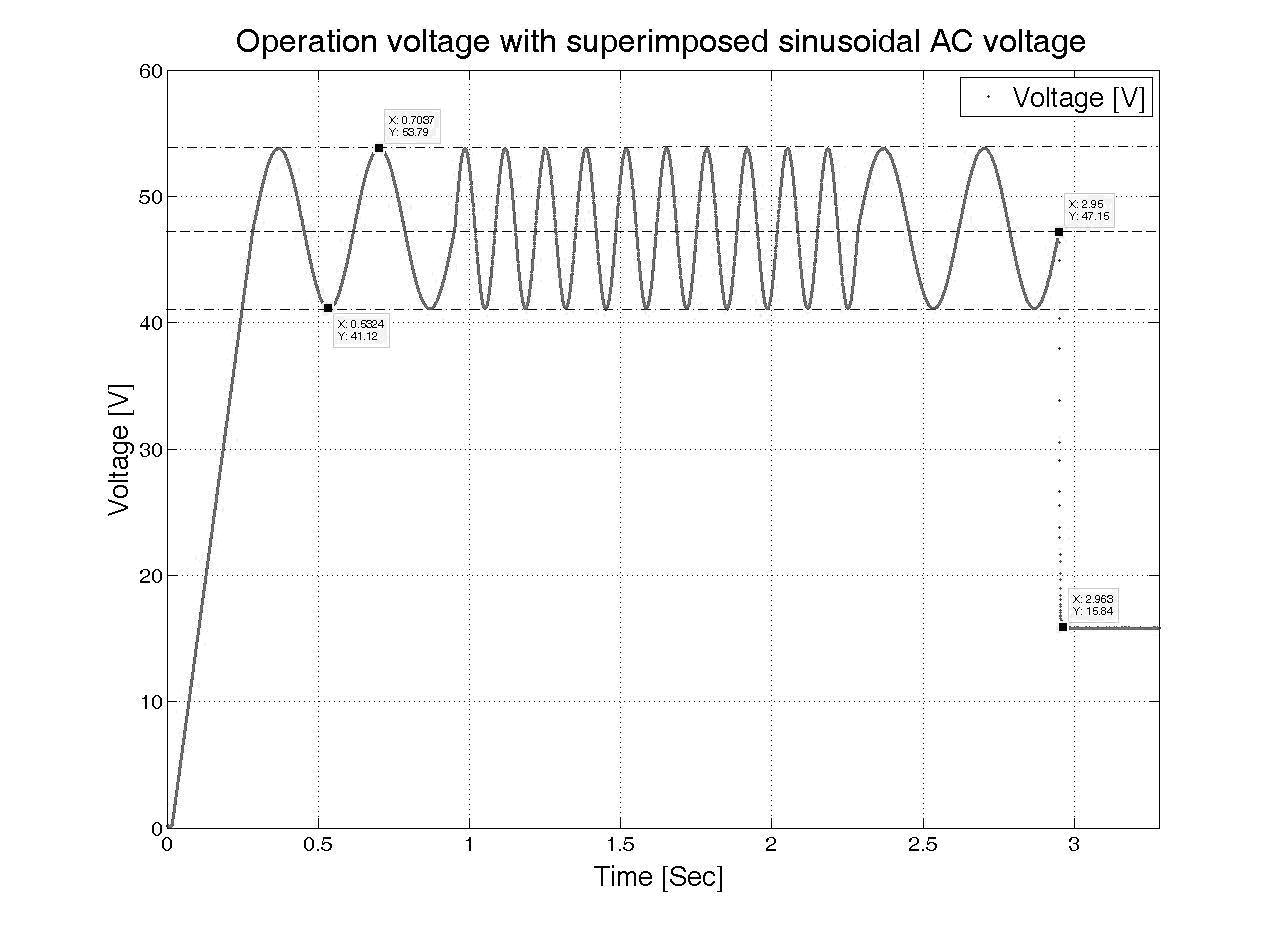
Fig. 7 – Campioni di tensione del segnale di prova inviati via CAN
In questo test sono state misurate e inviate al PC via CAN le caratteristiche della tensione di alimentazione generate. I valori di tensione rilevati sono riportati nella figura 7.
Grazie alla frequenza di misurazione elevata (8 kHz) e al data rate CAN di 500 kbps, è possibile inviare un messaggio CAN con un nuovo campione di tensione ogni 125 us. Il data rate CAN non è un fattore limitante.
Test N. 5 – Rete di bordo 48V – Recupero
Questo test simula le caratteristiche della tensione in fase di recupero dell’energia. La tensione della rete di bordo aumenta fino a 54 volt, valore che può essere rilevato direttamente da MM9Z1J638 senza dover ricorrere a partitori di tensione esterni. Vedi anche il Capitolo 2.
Si ipotizza che il sensore batteria intelligente venga alimentato dalla rete 12V e che venga usato per la diagnostica della rete 48V.
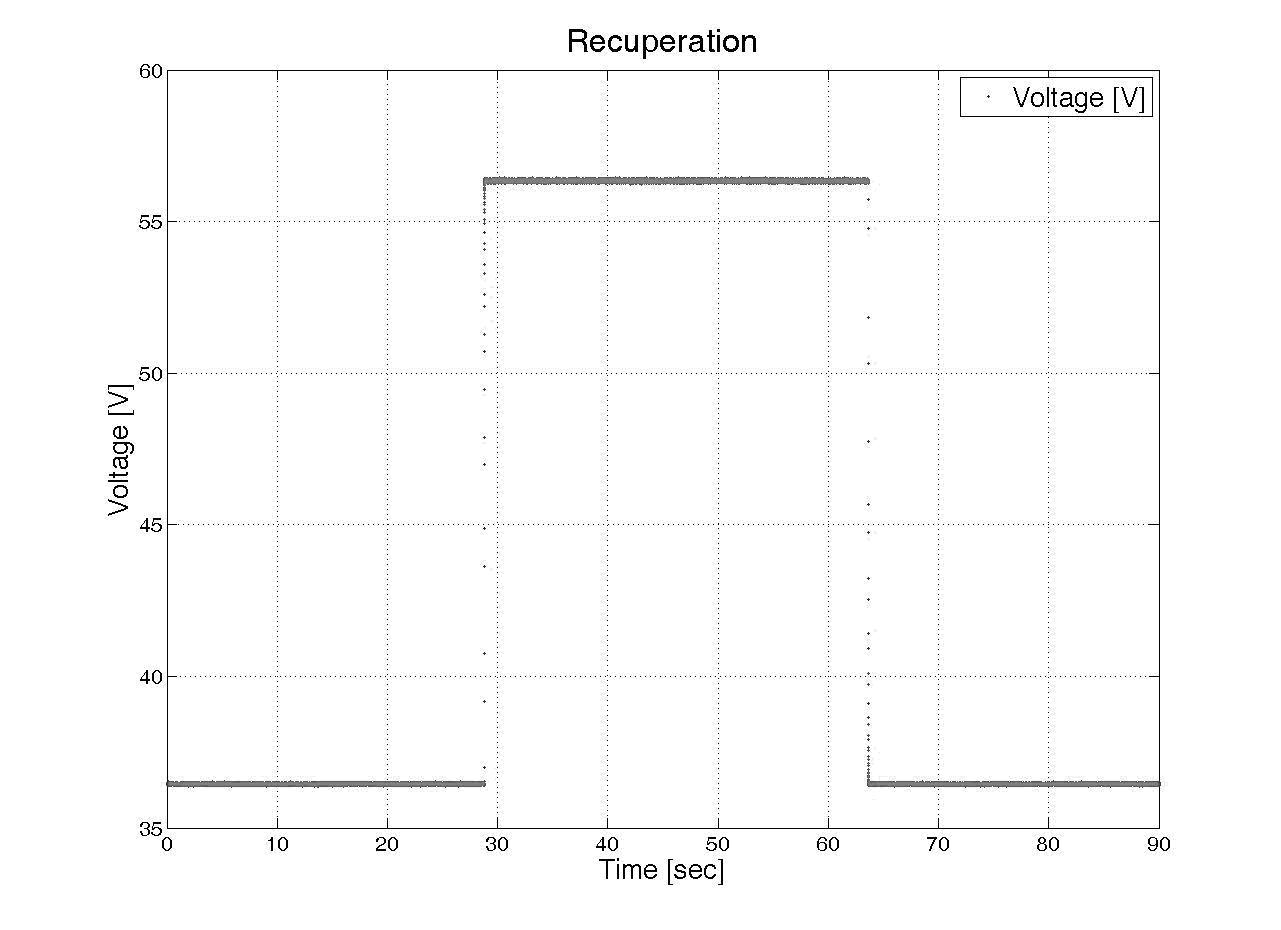
Fig. 8 – Campioni di tensione del segnale di prova inviati via CAN
Nella figura 8 sono riportati i campioni di tensione ricevuti via CAN. Benché nel corso del test il tempo di salita e di discesa tra le due tensioni sia stato ridotto da 100ms a 2ms, come si può vedere l’IBS è comunque in grado di misurare e trasmettere valori lungo il fronte ascendente e discendente del segnale di prova. Anche in questo caso la velocità di trasmissione CAN non è il fattore limitante. Di conseguenza, il tempo critico per la rilevazione di condizioni pericolose o di guasti è determinato dalla velocità di campionamento del sensore batteria intelligente.
Test N. 6 – Rete di bordo 12V – Impulso di avviamento
L’ultimo test riguarda l’impulso di avviamento che viene misurato all’interno di un veicolo, come avviene nell’applicazione standard di gestione della batteria 12V.
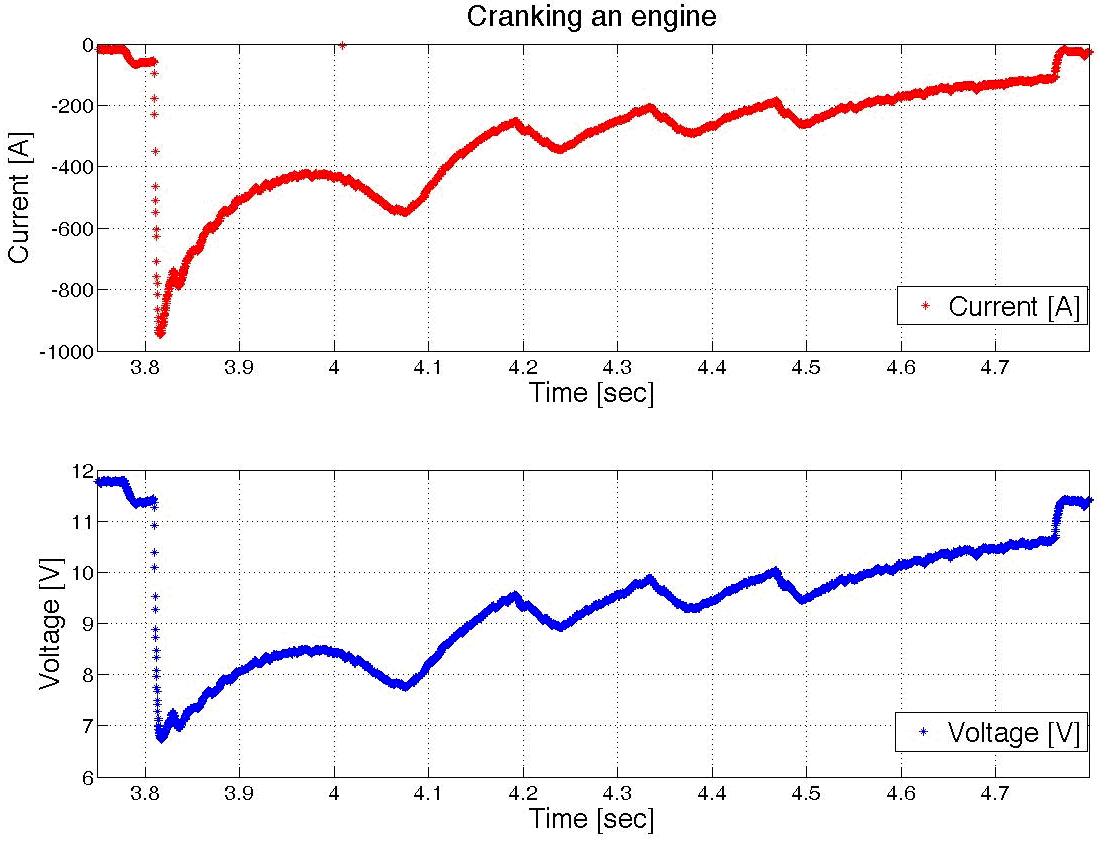
Fig. 9 – Campioni di tensione e corrente del segnale di prova inviati via CAN
I campioni di tensione e corrente vengono inviati via CAN il più rapidamente possibile. Nella figura 9 sono riportati i valori dei campioni di tensione e corrente ricevuti via CAN.
Come nei test precedenti, il data rate CAN consente di rilevare condizioni pericolose o guasti con un ritardo massimo che è determinato dalla velocità di campionamento del sensore batteria intelligente.
Le funzionalità avanzate consentono al dispositivo MM9Z1J638 di monitorare in modo rapido ed efficace la rete elettrica di bordo, sia 12V che 48V, e di inviare rapidamente i risultati al BCM/Energy Management Controller tramite il protocollo CAN. È stata calcolata sperimentalmente la latenza massima in fase di invio di messaggi CAN contenenti informazioni di diagnostica per le modalità di funzionamento più importanti dell’IBS (power down/power on reset, modo a basso consumo energetico (“sleep”) e modo normale).
Sebbene la maggior parte dei test effettuati nel presente studio siano basati sulla tensione, i risultati possono essere correlati alle rispettive misurazioni della corrente in quanto i canali di acquisizione dei valori di tensione e di corrente sono simmetrici e totalmente sincronizzati (entro 2us) e non sono previsti disallineamenti grazie alla rettifica automatica del guadagno sul canale relativo alla corrente.
Come dimostrato dal test N. 6, la larghezza di banda fornisce uno spazio sufficiente per inviare contemporaneamente campioni di tensione e di corrente alla velocità di campionamento massima (8kHz) su entrambi i canali.
Bibliografia
[1] Allgemeiner Deutscher Automobil-Club e.V., Aggregate supplier indicative data for 2004-5 Europe and North America
[2] Freescale Inc, “Xtrinsic Battery Sensor MM9Z1J638”, datasheet, www.freescale.com
[3] BMW AG, “Electrical/Electronic Assemblies in Motor Vehicles Electrical Requirements”, BMW group standard GS 95003-2, gennaio 2010
[4] BMW AG, “Electrical and electronic components in motor vehicles
48V electrical system, Requirements and testing”, BMW group standard
GS 95026, ottobre 2011
[5] NXP Semiconductors, “TJA1042”, datasheet, www.nxp.com
Michael Hutterer, systems application engineer for battery management products, analog and sensor group, Freescale, Monaco, Germania - Christian Greiner-Fuchs, b.eng., Coburg University of Applied Sciences, Coburg, Germania - Antonio Leone, product line manager for battery management products, analog and sensor group, Freescale, Monaco, Germania - Eberhard Binder, Reutlingen University, Reutlingen, Germania - Michael Rossner, Coburg University of Applied Sciences, Coburg, Germania
Contenuti correlati
-
 Scopri come ottimizzare il motion per ogni applicazione radiologica
Scopri come ottimizzare il motion per ogni applicazione radiologicaKollmorgen dispone delle tecnologie e delle competenze di motion giuste per ogni sistema di imaging. Migliora i sistemi di imaging TC, RMI, imaging ibrido, mammografia digitale e imaging nucleare. Sistemi fissi, raggi X mobili e centri di...
-
 Percepio rilascia la versione 4.3 di Tracealyzer
Percepio rilascia la versione 4.3 di TracealyzerPercepio ha annunciato il rilascio della versione 4.3 di Tracealyzer, uno strumento visuale per la diagnostica in tempo reale di software embedded o in ambiente Linux. La release integra nuove funzionalità di analisi a livello di macchine...
-
 Semiconduttori per automotive: NXP in cima alla classifica
Semiconduttori per automotive: NXP in cima alla classificaSecondo l’ultima analisi di mercato di Semicast Research, NXP è risultato il primo fornitore di semiconduttori per quanto riguarda il settore automobilistico nel 2015. Infineon ha superato Renesas Electronics (passata al terzo) e si è aggiudicata un secondo...
-
 NXP e Freescale ufficializzano la fusione
NXP e Freescale ufficializzano la fusioneNXP Semiconductors e Freescale Semiconductor annunciano il completamento della fusione in conformità ai termini dell’accordo del marzo 2015, già comunicati in precedenza. Dalla fusione è nata un’azienda leader del settore dei semiconduttori, con ricavi congiunti superiori a 10 miliardi...
-
 Freescale incrementa la sicurezza dei passeggeri con una tecnologia radar
Freescale incrementa la sicurezza dei passeggeri con una tecnologia radarFreescale Semiconductor e Continental, società che collaborano da lunga data, annunciano i piani di integrazione della nuova tecnologia radar 77 GHz di Freescale nei moduli radar a corto e medio raggio di nuova generazione di Continental studiati per il...
-
 Freescale: Single Chip Module per l’IoT
Freescale: Single Chip Module per l’IoTFreescale Semiconductor ha lanciato il più piccolo modulo single chip (SCM) del mondo per IoT – Internet of Things. Poiché l’IoT richiede la concentrazione di una maggiore potenza di elaborazione in spazi sempre più ridotti, la nuova...
-
 Finale Emea della Freescale Cup
Finale Emea della Freescale CupUn gruppo di studenti provenienti da 11 Paesi hanno partecipato alla finale Emea della Freescale Cup 2015 che si è svolta presso il Politecnico di Torino. La Freescale Cup, sponsorizzata da Freescale Semiconductor, è una competizione mondiale...
-
 MEMS Industry Group, community di algoritmi Open-Source
MEMS Industry Group, community di algoritmi Open-SourceDurante il suo discorso di apertura al MEMS Executive Congress US 2014, Karen Lightman, direttore esecutivo di MEMS Industry Group (MIG), ha annunciato la prima community cooperativa open-source, Accelerated Innovation Community (AIC). Con il supporto di Freescale Semiconductor, membro...
-
 Freescale e Green Hills insieme per un laboratorio didattico
Freescale e Green Hills insieme per un laboratorio didatticoFreescale Semiconductor e Green Hills Software hanno collaborato per realizzare un laboratorio didattico SafeAssure presso l’Università di Padova. Il laboratorio didattico SafeAssure è dotato dell’avanzata tecnologia industriale SafeAssure di Freescale e dell’ambiente di sviluppo integrato MULTI Ide...
Scopri le novità scelte per te
-
Scopri come ottimizzare il motion per ogni applicazione radiologica
Kollmorgen dispone delle tecnologie e delle competenze di motion giuste per ogni sistema di imaging. Migliora i...

News/Analysis Tutti ▶
-
 Mouser: i vantaggi dell’elettronica di potenza basata su GaN
Mouser: i vantaggi dell’elettronica di potenza basata su GaNMouser Electronics ha recentemente pubblicato un nuovo eBook, realizzato in collaborazione con Analog Devices...
-
 eGain è stata nominata Visionaria del Gartner Magic Quadrant
eGain è stata nominata Visionaria del Gartner Magic QuadranteGain, la piattaforma di conoscenza IA per il servizio clienti, ha annunciato di essere...
-
 congatec compie 20 anni
congatec compie 20 annicongatec ha recentemente celebrato il suo ventesimo anniversario. Coerentemente con la propria visione, l’azienda...
Products Tutti ▶
-
 Un nuovo touch controller da Microchip
Un nuovo touch controller da MicrochipMTCH2120 è un nuovo touch controller a 12 pulsanti di Microchip Technology. Questo componente,...
-
 Panasonic Industry annuncia un nuova serie di relè
Panasonic Industry annuncia un nuova serie di relèPanasonic Industry ha recentemente presentato un nuovo relè PhotoMOS progettato per apparecchiature di misurazione,...
-
 Panasonic migliora la produzione di PCB
Panasonic migliora la produzione di PCBPanasonic Connect Europe ha realizzato il nuovo modular mounter NPM-GW, un modulo di montaggio...

