

















 31 / 86
31 / 86

ANALOG/MIXED SIGNAL
MOTION CONTROL
31
- ELETTRONICA OGGI 443 - MARZO 2015
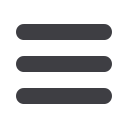
Pilotaggio del motore adattato
alle diverse applicazioni e modalità operative
Le diverse tecniche di controllo degli attuatori, adotta-
te in ambito automobilistico, richiedono facilità di adat-
tamento dello stadio di potenza e della tecnica di pilo-
taggio. La nuova generazione di controllori HVC (Fig. 2)
indirizza espressamente questo requisito, grazie al suo
stadio di uscita configurabile, a una periferica integ-
rata dedicata alla generazione di segnali PWM evoluti,
completamente programmabile e un potente processo-
re ARM Cortex-M3. Il dispositivo integra sei semi-ponti
n/n (“charge-pump” inclusi) che possono essere adattati
al tipo di motore con un appropriato collegamento del
pin di uscita e un’adeguata configurazione del software.
Nella figura 3 sono riportati alcuni esempi di impiego
dei controllori HVC nei sistemi di attuazione.
Il modulo EPWM (Enhanced Pulse-Width Modulation)
supporta un ricircolo passivo e attivo della corrente
(rettificazione sincrona e asincrona) per i diversi modi
operativi e tipi di motore (Tab. 1). La misura di corrente
integrata e convertitori digitali/analogici consentono di
programmare il valore nominale della corrente operativa
(ad esempio per micro-stepping controllati in corrente).
Nel motore PMSM/BLDC il segnale di retroazione della
posizione del rotore può essere determinato in maniera
“sensorless”, per mezzo di comparatori e riferimenti in-
tegrati a stella, o in alternativa per mezzo di sensori ed
“encoders” a effetto Hall. Inoltre, è possibile selezionare
la modalità di commutazione per motori passo-passo, ad
esempio per raggiungere velocità di rotazione più ele-
vate, e programmarne i diversi modi di funzionamento
(full/half-step, wave drive, micro-step e così via).
Algoritmi per il controllo in velocità e corrente possono
essere eseguiti rapidamente con la CPU ARM Cortex-M3,
con l’ausilio di convertitori A/D ad alta velocità e sup-
porti hardware per la misura di tensioni e di corrente. Lo
stadio di uscita comprende la protezione da sovraccari-
co (sovratensione/sovracorrente) e funzioni di diagno-
stica. I moduli periferici integrati per il pilotaggio del
motore (EPWM, comparatori, riferimento centro stella,
convertitore D/A, diagnosi e protezione da sovraten-
sione/sovracorrente, monitoraggio della temperatura
...) possono essere programmati per i modi operativi
elencati in tabella 1. Nella figura 3 sono riportati al-
cuni esempi di sistemi di attuazione che utilizzano la
famiglia HVC.
Fig. 1- Flessibilità ed efficienza economica in soluzioni di controllo realizzate con la famiglia Micronas HVC per servomotori