

















 33 / 86
33 / 86

ANALOG/MIXED SIGNAL
MOTION CONTROL
33
- ELETTRONICA OGGI 443 - MARZO 2015
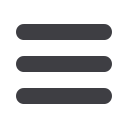
Tabella 1 – Panoramica dei tipi di motore e lemodalità di funzionamento con il nuovo HVC
Tipo di motore Configurazioni Ponte
Esempi di modo
di funzionamento
Esempi di applicazioni
Motore 3-fasi
PMSM/BLDC
Il ponte è configurato per pi-
lotare le fasi del motore.
Corrente di fase: 0.6 A (effetti-
va), 1.0 A (picco)
Commutazione trapezoidale con modulazio-
ne di PWM, “sensored” e “sensorless”
Space Vector Modulation con misura di posi-
zione del rotore, ad esempio tramite sensori
Hall
Misura della corrente possibile in tutte le mo-
dalità operative tramite uno shunt esterno
Ventilatore luci anteriori a LED
AGM
HVAC
Pompe piccole/ausiliarie
Misura ottica della distanza (LiDAR)
Regolazione fari
Sistema AFS (Adaptive Front-light
System)
HUD (Head-up display)
Regolazione specchietti retrovisori
Regolazione del display di naviga-
zione
Relè intelligenti
e così via
Motore bipolare
passo-passo
Il ponte è configurato per pi-
lotare le fasi del motore
Corrente di fase: 0.3 A (effetti-
va), 0.5 A (picco)
Funzionamento full e semi-step
Pilotaggio wave drive
Controllo in commutazione tramite i compa-
ratori di Back-EMF, ad esempio per realizzare
velocità di rotazione più elevate.
Controllo in micro-stepping ad anello aper-
to “Voltage Controlled” o ad anello chiuso
“Current Controlled” con soglie di corrente
programmabili tramite convertitore D / A
(“Current-Shaping”).
Lo stadio di uscita comprende circuiti per
la misura integrata di corrente e per la pro-
grammazione delle soglie di corrente. Uno
shunt esterno non è necessario.
Motori a spaz-
zola a corrente
continua
Secondo la configurazione
del ponte, più motori DC
possono essere attivati fino
ad una corrente di fase di 0.6
A (effettiva)
Auto commutazione
Misura della corrente del motore per il con-
trollo
Per il controllo in posizione lettura di enco-
der/uscita del sensore
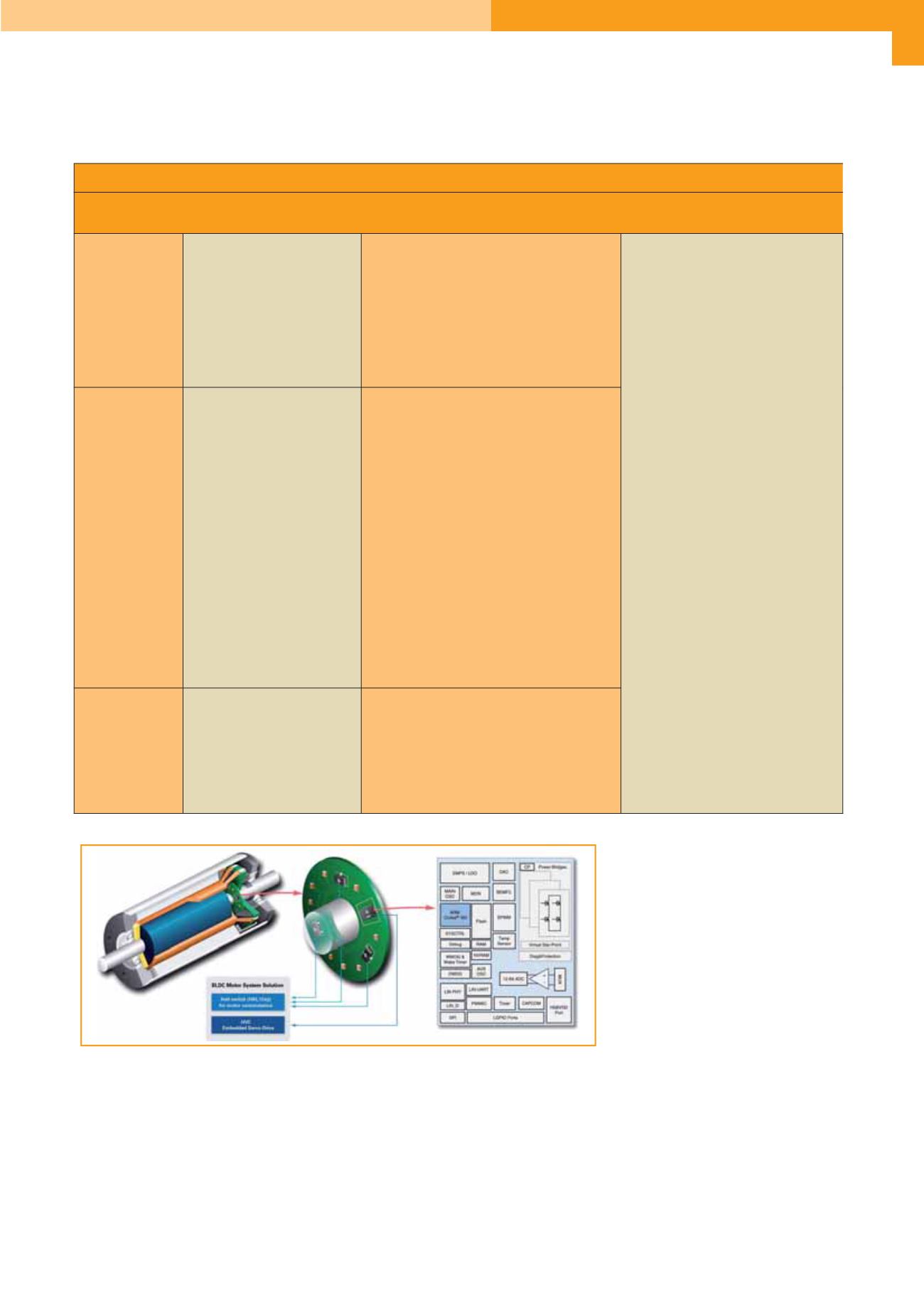
ponte e così via. Il piccolo package 40-pin QFN 6x6 del
nuovo HVC è adatto per la miniaturizzazione e l’integra-
zione diretta dell’elettronica nel motore o nell’attuatore
(Fig. 4). Inoltre, la tecnologia “exposed-PAD” (ePAD) garan-
tisce un’efficace dissipazione termica. L’estesa gamma di
temperatura di giunzione da -40 °C
a +150 °C e il monitoraggio integra-
to di condizioni di sovratemperatura
consentono l’impiego in applicazioni
critiche a livello termico.
L’adattamento software permette di
indirizzare un gran numero di funzi-
oni e applicazioni. L’utente può effi-
cacemente realizzare una piattafor-
ma completa di attuatori con un solo
tipo di controllore.
Il numero ridotto di componenti di-
screti e l’elevata integrazione for-
niscono un elevato grado di mini-
aturizzazione e consentono soluzioni economiche con i
vantaggi e i benefici derivanti dall’impiego di motori mo-
derni. L’alto livello di riusabilità di hardware e software
consente di adeguarsi rapidamente ai cambiamenti dei re-
quisiti dei clienti.
Q
Fig. 4 – Electronics integration in the BLDC motor Integrazione dell’elettronica in un motore BLDC