Aumentare la produzione di cibo richiede creatività (3a Parte)
Con il supporto di Mouser in qualità di sponsor, i team degli studenti che partecipano al concorso proposto dal CLIK Lab del Politecnico di Torino devono affinare le loro competenze su temi quali la stampa 3D, il condizionamento del segnale, l’elaborazione delle immagini e lo sviluppo di software integrati per terminare i loro progetti in linea con i tempi previsti.
-

- Tweet
- Pin It
- Condividi per email
-
Con l’avvicinarsi della fine del secondo mese della CLIK Agritech Challenge organizzata dal Politecnico di Torino e con le presentazioni delle risultati intermedi, gli studenti devono ora mettercela tutta con il loro progetti: il tempo a disposizione sta per finire. Tutti e tre i team sembrano però aver fatto dei progressi notevoli.
Il team IS4H2O, che sta studiando l’uso della riflettometria GNSS per determinare il tasso di umidità nel suolo, è a buon punto. Secondo le stime, sono riusciti a completare più del 75% del lavoro ottenendo dei solidi risultati sia in relazione all’acquisizione dei dati che all’elaborazione del segnale post-acquisizione. Sono tuttavia consapevoli che sarà necessario apportare ulteriori modifiche per amplificare il segnale, in modo da rendere possibile la manipolazione dei dati sull’intero spettro. A poco più di tre settimane dal termine, c’è ancora parecchio lavoro da fare.
Dopo una lunga fase di procedimenti per prove ed errori nell’applicazione di diversi modelli matematici, è stato formulato un algoritmo funzionante grazie a cui si può determinare con accuratezza il punto di riflessione del segnale. I prossimi passi riguardano ora l’uso del software NavSA, insieme con MATLAB, per valutare la potenza del segnale. Prendendo in esame i valori acquisiti dei segnali riflessi e diretti attraverso il ricevitore e mettendoli a confronto, sarà possibile calcolare la percentuale di umidità a un dato punto di riflessione. Successivamente, raccogliendo questi dati comparativi da una moltitudine di punti diversi, sarà possibile realizzare una mappa dettagliata dei livelli di umidità del suolo su tutta l’area monitorata.
Nonostante siano stati effettuati dei test approfonditi del front-end RF, connesso direttamente ad un PC (con sistema operativo Windows), è stato possibile trasmettere soltanto un segnale debole. Per risolvere il problema, è stato installato il software di acquisizione dati basato su Linux sull’unità Raspberry Pi 3 B+. Sebbene il sistema avesse dato prova di miglioramento, il segnale non era ancora forte abbastanza. Si è ipotizzato che il problema potesse essere legato all’antenna. Tuttavia, i test hanno dimostrato che a causare i problemi era invece l’interfaccia USB 2.0 della Raspberry Pi 3+, la cui eccessiva lentezza incideva in qualche modo sulla potenza del segnale captato. Si è considerato pertanto di accelerare il sistema sostituendo la scheda Raspberry Pi 3+ con una HiKey960 di Seeed Studio, che include connettività USB 3.0 e che, come la Pi 3 B+, opera con Linux. Questa nuova scheda ha quattro processori ARM Cortex-A73 e altrettanti Cortex-A53, con 32 GB di memoria flash su scheda.
Il team VERDE, che si è riproposto di fornire immagini dettagliate dei vigneti al fine di aumentarne il rendimento, ha subito una battuta di arresto. Sfortunatamente un membro del team si è ritirato per potersi concentrare sulla tesi di laurea, ma gli altri tre studenti non si sono fatti scoraggiare. Avendo raggiunto una fase nel processo di prototipazione per cui erano necessari dei test più accurati, hanno contattato un viticoltore per ottenere le coordinate del perimetro della sua proprietà. A partire da queste coordinate (dopo aver estratto i dati attinenti da Google Earth), è stato possibile mappare il percorso che il drone avrebbe dovuto compiere attraverso il vigneto, nonchè determinare i punti in cui sarebbe stato ottimale rilevare i dati per poi modificare il codice opportunamente.
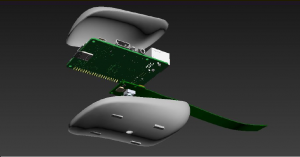
Usando il software Max 3ds, è stato creato un modello dell’involucro esterno del drone, che doveva avere una grandezza sufficiente da ospitare tutti i componenti elettronici (tra cui la scheda Rasberry Pi 3+ e la videocamera Pi NoIR V2). Con l’aiuto di modelli 3D preesistenti, reperiti da Internet di queste due parti, poi convertiti in un formato file compatibile e infine importati nel package del software, non c’è stato bisogno di inserire tutte le dimensioni dei componenti e di eseguire il rendering da zero, risparmiando così molto tempo. In termini di estetica, il parere condiviso è stato quello di adottare un tocco “biologico” per rimanere in linea con il nome del team. Per questo motivo tutti hanno convenuto nel seguire un design che ricordasse la forma di una foglia.
Dopo aver terminato il modello, lo step successivo prevedeva di fabbricarlo usando una stampante 3D. Sebbene nessun membro del team VERDE potesse vantarsi di un’esperienza nell’uso di questo strumento, l’aiuto era a portata di mano: alcuni membri degli altri team sono stati felici di aiutare, dando il loro ben apprezzato sostegno.
Come già spiegato, il team SNAP si è posto l’obiettivo di fornire agli agricoltori la possibilità di accedere a dati meteorologici locali in tempo reale. Nelle ultime settimane gli studenti hanno lavorato principalmente sui circuiti elettronici del payload del drone (che comprendono i sensori di pressione dell’aria, della temperatura e dell’umidità oltre alla batteria, il GPS e i componenti di connessione). Inoltre, anche il server e la sua interfaccia web sono stati oggetto di studio.
Innanzitutto hanno dovuto sostituire il ricevitore del GPS, perché era diventato problematico ottenere una posizione fissa dal satellite. Il team è passato da un modulo FT-X-GPS di FTDI ad un GPS HAT 2324 di Adafruit . Sebbene questo hardware sia stato progettato specificamente per schede Raspberry Pi, gli studenti sono stati in grado di farlo funzionare con l’UDOO Neo (usando le porte UART dell’unità UDOO ). I test condotti al campus del Politecnico non hanno raggiunto dei risultati particolarmente soddisfacenti, a causa delle grandi dimensioni dei palazzi che si trovano nelle vicinanze. Si è quindi deciso di eseguire ulteriori test in spazi più aperti, più simili ad un ambiente coltivabile per cui il sistema è stato pensato.
Successivamente, è stata presa in esame la misura dell’altitudine. Fino a questo punto, il GPS era stato in grado di stimare l’altezza del drone sopra il suolo così come la posizione geografica, tuttavia senza un grado di precisione sufficiente e con un margine di errore semplicemente troppo grande. Si è presentata quindi la necessità di integrare un meccanismo molto più efficiente per determinare con accuratezza l’attitudine del drone (usando sia la metodologia laser che quella a ultrasuoni).
Un altro aspetto che doveva essere preso in considerazione era il carico dell’involucro. In principio è stato usato un comune involucro industriale ingombrante che è stato poi sostituito con un design personalizzato più piccolo e compatto, che offre migliori proprietà aerodinamiche, creato nei locali per la stampa 3D di CLIK Labs.

Figura 2: Diagramma rappresentante gli elementi chiave del payload SNAP.
Il team ha registrato il dominio www.snapproject.it ed ha spostato le operazioni dal webserver locale ad un server remoto. Piuttosto che ricorrere ad una grafica 2D, si è pensato che un rendering grafico con un look più professionale di una mappa termica avrebbe portato ad un’esperienza più coinvolgente per l’utente. Ciò comporta l’accesso a tutti i dati da un unico dashboard di facile utilizzo senza che l’agricoltore debba ricorrere a più schermi. Il team è stato molto impegnato anche dal punto di vista commerciale con lo sviluppo della loro pagina web contenente le informazioni utili sul servizio offerto per potenziali clienti.
Nelle prossime settimane, il team IS4H2O prevede di continuare a lavorare sul potenziamento dell’accuratezza del segnale ricevuto, per fare in modo di ottenere un’esatta indicazione della percentuale d’acqua nel suolo in un determinato punto. Tempo permettendo, saranno condotti dei test sul campo. Il team VERDE continuerà a testare il suo algoritmo per il GPS e completare il lavoro su stampa a 3D, mentre il team SNAP cercherà di migliorare il modo in cui I dati vengono raccolti e di conseguenza rappresentati. Tutti e tre i team sperano di poter impressionare il panel dei giudici con le loro presentazioni finali.
Foto di apertura: Diagramma rappresentante gli elementi chiave del payload SNAP
Contenuti correlati
-
 Riduzione del peso: un requisito indispensabile per la UAM
Riduzione del peso: un requisito indispensabile per la UAMMark Patrick, Mouser Electronics Questa serie di blog, articolata in cinque parti, analizza le opportunità della mobilità aerea urbana (UAM – Urban Air Mobility), la nuova frontiera dei trasporti urbani che prevede l’uso di aeromobili a propulsione...
-
 Webinar sul Compute Module 4 da element14 Community e Raspberry Pi
Webinar sul Compute Module 4 da element14 Community e Raspberry Pielement14 ha annunciato un webinar in collaborazione con Raspberry Pi focalizzato sul Raspberry Pi Compute Module 4. Dotato di processore quad-core ARM Cortex-A72, doppia uscita video e una vasta gamma di interfacce, il CM4 è disponibile in...
-
 Da Conrad il nuovo case Weidmüller per Raspberry PI 4
Da Conrad il nuovo case Weidmüller per Raspberry PI 4Weidmüller ha presentato u-maker Box, disponibile sulla piattaforma di sourcing Conrad, destinato ai progetti maker, laboratori di prova, reparti di ricerca e applicazioni industriali. Si tratta di un contenitore modulare che offre tutto il necessario per custodire...
-
 Monitoraggio delle risorse IoT: le ultime novità
Monitoraggio delle risorse IoT: le ultime novitàLe recenti innovazioni sono state particolarmente positive per i fornitori di soluzioni di monitoraggio e per gli utenti finali: ma siamo solo all’inizio Leggi l’articolo completo su Embedded 90
-
 Raspberry PI: è arrivata la quinta generazione
Raspberry PI: è arrivata la quinta generazioneRaspberry Pi 5 è realizzato con una nuova architettura basata su un processore ad alte prestazioni di Broadcom e un nuovo chip realizzato “in house” Leggi l’articolo completo su Embedded 90
-
 Webinar sulla gamma di fotocamere Raspberry Pi da element14 Community
Webinar sulla gamma di fotocamere Raspberry Pi da element14 Communityelement14 Community sta ospitando una serie di webinar sulla gamma di telecamere di Raspberry Pi, come la nuova Global Shutter Camera. “I prodotti Raspberry Pi continuano a essere i preferiti dai membri della nostra Community”, ha dichiarato...
-
 onsemi collabora con Renesas per la sicurezza della guida semi-autonoma
onsemi collabora con Renesas per la sicurezza della guida semi-autonomaLa famiglia di sensori di immagine Hyperlux di onsemi è stata integrata nella piattaforma R-Car V4x di Renesas. L’obiettivo è quello di migliorare i sistemi di visione, e quindi aumentare la sicurezza, dei veicoli a guida semi-autonoma....
-
 onsemi: sensori di immagine a basso consumo per uffici e abitazioni
onsemi: sensori di immagine a basso consumo per uffici e abitazionionsemi ha presentato la famiglia di sensori di immagine Hyperlux LP concepita per le telecamere industriali e commerciali per applicazioni come campanelli smart, telecamere di sicurezza, visori AR/VR/XR, visione artificiale e videoconferenza. Questi sensori, con pixel da...
-
 Virtualizzazione e monitoraggio remoto: un valido approccio per affrontare i problemi nella catena di approvvigionamento
Virtualizzazione e monitoraggio remoto: un valido approccio per affrontare i problemi nella catena di approvvigionamentoDevAlert Sandbox di Percepio è un esempio di come la virtualizzazione e l’emulazione hardware possano essere integrate in un package compatto, consentendo alle aziende che sviluppano prodotti edge/IoT di continuare a farlo senza dover attendere la disponibilità...
-
 La nuova famiglia di sensori di immagine Hyperlux di onsemi
La nuova famiglia di sensori di immagine Hyperlux di onsemiLa sua nuova famiglia di sensori di immagine Hyperlux di onsemi per applicazioni automotive offre caratteristiche come una dimensione dei pixel di 2,1 µm, un elevato range dinamico (HDR) di 150 dB e attenuazione dello sfarfallio prodotto...
Scopri le novità scelte per te
-
Riduzione del peso: un requisito indispensabile per la UAM
Mark Patrick, Mouser Electronics Questa serie di blog, articolata in cinque parti, analizza le opportunità della mobilità...
-
Webinar sul Compute Module 4 da element14 Community e Raspberry Pi
element14 ha annunciato un webinar in collaborazione con Raspberry Pi focalizzato sul Raspberry Pi Compute Module 4....

News/Analysis Tutti ▶
-
 Cuffie 3M a energia solare sulla Conrad Sourcing Platform
Cuffie 3M a energia solare sulla Conrad Sourcing PlatformConrad Electronic ha annunciato la disponibilità sulla sua piattaforma delle cuffie 3M PELTOR WS...
-
 KIOXIA premiata per l’invenzione della memoria Flash NAND 3D
KIOXIA premiata per l’invenzione della memoria Flash NAND 3DKIOXIA ha ricevuto da FMS: the Future of Memory and Storage il premio 2024...
-
 Partnership globale tra DigiKey e Kingston Technology
Partnership globale tra DigiKey e Kingston TechnologyDigiKey ha stretto una partnership con Kingston Technology per la distribuzione a livello mondiale...
Products Tutti ▶
-
 Protezione per i battery pack per EV da Parker Chomerics
Protezione per i battery pack per EV da Parker ChomericsLa Chomerics Division di Parker Hannifin ha presentato i nuovi pad termoconduttivi THERM-A-GAP PAD 30,...
-
 Murata: MLCC formato 0603 da 100 μF
Murata: MLCC formato 0603 da 100 μFMurata ha realizzato dei condensatori MLCC (Multi Layer Ceramic Capacitor) caratterizzati da una capacità...
-
 I nuovi sensori di misura laser di Panasonic Industry
I nuovi sensori di misura laser di Panasonic IndustryPanasonic Industry ha introdotto la serie HL-G2, ampliando la sua offerta di sensori di...


){kind=link}