Aumentare la produzione di cibo richiede creatività (4a Parte)
Dopo molte settimane di duro lavoro, i tre team di studenti che hanno partecipato alla CLIK Lab’s Agritech Challenge del Politecnico di Torino, sponsorizzata da Mouser, hanno finalmente completato i loro ambiziosi progetti. Scopriamo insieme i risultati e ciò che i team hanno appreso da questa esperienza.
-

- Tweet
- Pin It
- Condividi per email
-

Nei tre mesi che sono trascorsi dall’inizio della CLIK Agritech Challenge del Politecnico di Torino, sono successe molte cose. Durante tutte le fasi del processo, la risolutezza degli studenti è stata messa alla prova e i team hanno dovuto avvalersi di tutte le loro competenze tecniche per completare il lavoro.
L’obiettivo del team VERDE prevedeva di fornire ai produttori di vino, attraverso delle videocamere montate su droni, dei dati di imaging relativi alle vigne, al fine di raggiungere una maggiore efficienza operativa e rispondere ai problemi che possono influenzare la produzione. Nel tempo ancora a disposizione, gli studenti hanno finalizzato la presentazione da esporre al panel dei giudici.
Dopo aver completato il design del prototipo, il team ha cominciato a trasformare il rendering CAD/CAM in un oggetto fisico. Si sono tuttavia riscontrati alcuni problemi con l’uso della stampante 3D (come è totalmente comprensibile se si considera che il team non aveva esperienza con questo tipo di strumento). Per questo motivo, sono state apportate delle modifiche alla forma levigata (e piuttosto idealizzata) originale e si è optato invece per qualcosa di più semplice da stampare, ma ancora relativamente affusolato e aerodinamico. Una volta stampata, come si può vedere in Figura 1, la superficie esterna dell’involucro era più angolare di quanto previsto dal concetto originale.

Figura 1: involucro esterno in stampa 3D – team VERDE
La fase successiva consisteva nel portare a termine i test degli algoritmi del GPS. Inizialmente è stato necessario combinare insieme le immagini separate. A questo punto il team ha dovuto sviluppare un codice per poter unire i dati delle immagini mentre il drone era in volo. Il codice è stato editato in modo da combinare e ruotare due foto nello stesso momento in maniera più fedele al percorso del drone.
Il team SNAP , che si è concentrato sulla costruzione di una stazione metereologica autonoma mobile per accedere a dati meteorologici in tempo reale, ha terminato il progetto con sole poche modifiche dell’ultimo minuto, che riguardavano principalmente il GPS, dal momento che ottenere una posizione fissa dal satellite richiedeva troppo tempo. Alla fine, si è deciso di usare un’antenna esterna, dato che il GPS HAT utilizzato fornisce il pin necessario per farlo.
Un’altra modifica chiave è stata l’aggiunta di un sensore ultrasonico, basato sul modulo HC-SR04 di Adafruit che avrebbe permesso al drone di effettuare delle misurazioni dell’altitudine più accurate (infatti era già stato confermato che il GPS non era in grado di fornire dati precisi). Il modulo è stato alimentato da un alimentatore da 5 V collegato alla scheda UDOO NEO. Quando bisogna effettuare una lettura dell’altitudine, il modulo trasmette un’onda ultrasuono e, misurando il tempo impiegato dal segnale riflesso ad essere ricevuto, si può calcolare l’altitudine.

Figura 2: il sensore ultrasuoni HC-SR04 di Adafruit.
Il sensore ultrasonico ha una portata da 10 a 4 cm, ma il team sapeva che ci sarebbero stati casi in cui si sarebbe dovuto tenere in considerazione delle altitudini maggiori. Si è deciso che, in tali circostanze, le letture della pressione sarebbero state usate per determinare invece la differenza di altitudine. Questo è stato possibile applicando la seguente equazione ipsometrica (dove la z denota le rispettive altitudini e la p le pressioni relative per ognuna di queste):
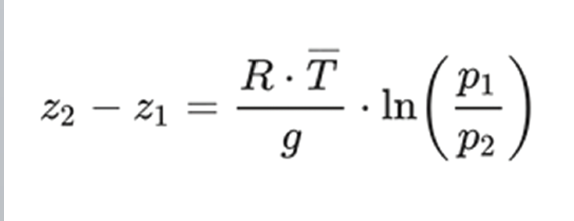
Acquisendo dati sui livelli di pressione dell’aria e sulla temperatura media, è stato possibile calcolare, con una buona approssimazione, l’altitudine rispetto alla pressione conosciuta di riferimento (ad esempio, la pressione normalmente registrata ad un’altitudine di 2 metri). La temperatura rilevata si è mantenuta sostanzialmente costante e anche nel peggiore dei casi, la variazione registrata tra 0 a 10 metri non era superiore a 1°C. Questo ha semplificato enormemente le calcolazioni.
Riguardo alla stazione di terra, il team ha deciso di usare un’altra scheda UDOO NEO, che gli ha permesso di risparmiare tempo, riutilizzando gran parte del codice che era già stato creato (relativo all’acquisizione e alla trasmissione dati). La stazione di terra comprendeva due sensori chiave: un modulo anemometro Adafruit 1733 e un modulo sensore dell’umidità del suolo SparkFun . Alimentato da un alimentatore da 12 V, l’anemometro era in grado di misurare la velocità del vento (sebbene non la direzione) e il segnale prodotto poteva essere letto da uno dei pin analogici della scheda UDOO NEO. Il sensore dell’umidità del suolo era alimentato da 5 V provenienti dalla scheda ed è stato calibrato tramite esposizione ad un ambiente secco (aria) e uno umido (acqua). La stampa dell’involucro della stazione di terra è stata affidata ad una stampante 3D. Il design è stato pensato per alloggiare l’anemometro sulla parte superiore, mentre tutto l’hardware dei sensori e dei componenti elettronici si trovava all’interno, al sicuro dagli elementi.
Attraverso l’interfaccia utente online che il team ha costruito, è stato possibile visualizzare in tempo reale le misurazioni provenienti dalla stazione di terra, oltre ad una mappa termica dettagliata basata sui punti di misurazione del drone. Si è poi valutato il rischio di ghiaccio su tutta l’area. Dato che questa interfaccia è stata sviluppata per essere totalmente asincrona, i dati più recenti vengono trasmessi senza dover ricaricare. Ogni punto di misurazione del drone può essere selezionato cliccando sulla mappa, di modo che l’informazione specifica relativa a ciascuno di essi possa essere esaminata dall’operatore del sistema. Un grafico cronologico, che mostra i cambiamenti termici nelle precedenti 24 ore (ad intervalli di 30 minuti) è inoltre disponibile.
L’obiettivo del progetto IS4H2O consisteva nell’ottenere, attraverso l’utilizzo della riflettometria GNSS, i dati relativi al livello di umidità nel suolo di un terreno agricolo. Al centro del sistema un drone alimentato esternamente: dato che questi elementi sono oggigiorno facilmente reperibili, il team aveva deciso già nelle prime fasi della competizione di non progettarlo da zero, così da poter focalizzare la loro attenzione sui temi che ponevano le più grandi difficoltà di progettazione. Il drone avrebbe incluso l’hardware di acquisizione dati (dotato degli algoritmi di elaborazione proprietari che avevano sviluppato), insieme con una riserva di archiviazione dati. Il peso dell’intero sistema si è tenuto sui 500 grammi con un volume di soli 150 mm x 100 mm x 70 mm, e il consumo di energia al di sotto di 15 W, permettendo l’integrazione con un drone di dimensioni ragionevoli.
Nelle ultime fasi della sfida sono stati compiuti dei miglioramenti notevoli alle prestazioni dell’antenna Linx ANT-GPS-SH2 (responsabile della ricezione del segnale RHCP direttamente dai satelliti GNSS) aggiungendo un piano di terra. Per il segnale riflesso la Antcom 1G1215RL ha confermato la sua efficacia, ma era troppo costosa. Nel tentativo di ridurre i costi, il team ha provato ad usare una seconda antenna ANT-GPS-SH2 invertita (dato che l’antenna Linx è di molto più economica di un dispositivo Antcom), che tuttavia non si è dimostrata efficace. La Amungo NUT4NT ha fornito un buon front-end RF, mentre la UDOO X86 (che ha sostituito la Raspberry Pi 3 B+ usata nel prototipo iniziale) ha fornito le capacità di elaborazione necessarie. Grazie all’interfaccia I/O, il team è stato in grado di aggiungere un comando di sincronizzazione direttamente dai comandi del drone, automatizzando quindi il processo di acquisizione dei dati. I package MATLAB/NavSAS installati sul sistema hanno potuto fornire le informazioni riguardo a tutti i satelliti disponibili durante la sessione di acquisizione, tracciando gradualmente la loro posizione e la velocità alla quale viaggiavano.
Il giorno della sfida è infine arrivato. Dopo aver concluso le presentazioni finali, sono seguite delle lunghe discussioni durante le quali sono state condivise delle idee interessanti su come poter continuare a sviluppare questi progetti. Il panel dei giudici, composto da professori universitari, staff di supervisione e sponsor, ha considerato la possibilità di combinare questi distinti (ed eterogenei) servizi dei tre team in un unico drone onnicomprensivo. Questo significherebbe poter affrontare diversi aspetti dell’automazione agricola, fornendo delle economie di scala agli agricoltori, che non avrebbero bisogno di investire in soluzioni specifiche per il singolo.
Il lavoro dei tre team è visionabile nei video da loro creati.
Mark Patrick, Mouser Electronics
Contenuti correlati
-
 SECO e Raspberry Pi siglano una partnership strategica
SECO e Raspberry Pi siglano una partnership strategicaSECO e Raspberry Pi hanno stretto un accordo commerciale strategico che ha l’obiettivo di espandere le opportunità di business grazie alla collaborazione nello sviluppo di hardware e software. In particolare, SECO porterà sul mercato una soluzione HMI...
-
 Webinar sul Compute Module 4 da element14 Community e Raspberry Pi
Webinar sul Compute Module 4 da element14 Community e Raspberry Pielement14 ha annunciato un webinar in collaborazione con Raspberry Pi focalizzato sul Raspberry Pi Compute Module 4. Dotato di processore quad-core ARM Cortex-A72, doppia uscita video e una vasta gamma di interfacce, il CM4 è disponibile in...
-
 Da Conrad il nuovo case Weidmüller per Raspberry PI 4
Da Conrad il nuovo case Weidmüller per Raspberry PI 4Weidmüller ha presentato u-maker Box, disponibile sulla piattaforma di sourcing Conrad, destinato ai progetti maker, laboratori di prova, reparti di ricerca e applicazioni industriali. Si tratta di un contenitore modulare che offre tutto il necessario per custodire...
-
 Monitoraggio delle risorse IoT: le ultime novità
Monitoraggio delle risorse IoT: le ultime novitàLe recenti innovazioni sono state particolarmente positive per i fornitori di soluzioni di monitoraggio e per gli utenti finali: ma siamo solo all’inizio Leggi l’articolo completo su Embedded 90
-
 Raspberry PI: è arrivata la quinta generazione
Raspberry PI: è arrivata la quinta generazioneRaspberry Pi 5 è realizzato con una nuova architettura basata su un processore ad alte prestazioni di Broadcom e un nuovo chip realizzato “in house” Leggi l’articolo completo su Embedded 90
-
 Webinar sulla gamma di fotocamere Raspberry Pi da element14 Community
Webinar sulla gamma di fotocamere Raspberry Pi da element14 Communityelement14 Community sta ospitando una serie di webinar sulla gamma di telecamere di Raspberry Pi, come la nuova Global Shutter Camera. “I prodotti Raspberry Pi continuano a essere i preferiti dai membri della nostra Community”, ha dichiarato...
-
 onsemi collabora con Renesas per la sicurezza della guida semi-autonoma
onsemi collabora con Renesas per la sicurezza della guida semi-autonomaLa famiglia di sensori di immagine Hyperlux di onsemi è stata integrata nella piattaforma R-Car V4x di Renesas. L’obiettivo è quello di migliorare i sistemi di visione, e quindi aumentare la sicurezza, dei veicoli a guida semi-autonoma....
-
 onsemi: sensori di immagine a basso consumo per uffici e abitazioni
onsemi: sensori di immagine a basso consumo per uffici e abitazionionsemi ha presentato la famiglia di sensori di immagine Hyperlux LP concepita per le telecamere industriali e commerciali per applicazioni come campanelli smart, telecamere di sicurezza, visori AR/VR/XR, visione artificiale e videoconferenza. Questi sensori, con pixel da...
-
 Virtualizzazione e monitoraggio remoto: un valido approccio per affrontare i problemi nella catena di approvvigionamento
Virtualizzazione e monitoraggio remoto: un valido approccio per affrontare i problemi nella catena di approvvigionamentoDevAlert Sandbox di Percepio è un esempio di come la virtualizzazione e l’emulazione hardware possano essere integrate in un package compatto, consentendo alle aziende che sviluppano prodotti edge/IoT di continuare a farlo senza dover attendere la disponibilità...
-
 La nuova famiglia di sensori di immagine Hyperlux di onsemi
La nuova famiglia di sensori di immagine Hyperlux di onsemiLa sua nuova famiglia di sensori di immagine Hyperlux di onsemi per applicazioni automotive offre caratteristiche come una dimensione dei pixel di 2,1 µm, un elevato range dinamico (HDR) di 150 dB e attenuazione dello sfarfallio prodotto...
Scopri le novità scelte per te
-
SECO e Raspberry Pi siglano una partnership strategica
SECO e Raspberry Pi hanno stretto un accordo commerciale strategico che ha l’obiettivo di espandere le opportunità...
-
Webinar sul Compute Module 4 da element14 Community e Raspberry Pi
element14 ha annunciato un webinar in collaborazione con Raspberry Pi focalizzato sul Raspberry Pi Compute Module 4....

News/Analysis Tutti ▶
-
 Premi per le piattaforme Edge AI di Advantech
Premi per le piattaforme Edge AI di AdvantechAdvantech ha annunciato che le sue piattaforme MIC-732-AO, UNO-148 V2, MIC-770 V3 + MIC-75GF10...
-
 I consigli di Cisco per il Black Friday e oltre
I consigli di Cisco per il Black Friday e oltreCisco avvisa sui possibili rischi per la sicurezza legati alle feste natalizie, Black Friday,...
-
 Lauterbach e Kernkonzept semplificano lo sviluppo di sistemi RISC-V
Lauterbach e Kernkonzept semplificano lo sviluppo di sistemi RISC-VLauterbach e Kernkonzept stanno collaborando per consentire lo sviluppo e i test sulle future...
Products Tutti ▶
-
 Murata amplia la sua offerta di alimentatori
Murata amplia la sua offerta di alimentatoriMurata ha aggiunto il modello PQC600 alla sua gamma di alimentatori AC/DC di tipo...
-
 Melexis presenta un sensore di corrente coreless
Melexis presenta un sensore di corrente corelessMLX91235 è un sensore di corrente di Melexis che elimina la necessità di un...
-
 Nuovi connettori USB 2.0 Type C da Same Sky
Nuovi connettori USB 2.0 Type C da Same SkyL’ Interconnect Group di Same Sky ha annunciato l’espansione della sua linea di connettori...


){kind=link}