Come scegliere l’uscita dell’encoder per migliorare prestazioni e integrità dei segnali
-

- Tweet
- Pin It
- Condividi per email
-
Nelle applicazioni di controllo del movimento è di solito richiesta la presenza di uno o più encoder, ovvero trasduttori di posizione. Esistono differenti tipi di encoder – incrementali, assoluti o a commutazione, assoluti o a commutazione – e i progettisti devo scegliere quello più adatto per la particolare applicazione considerata. Una volta presa la decisione, è necessario considerare altri parametri come la risoluzione e gli aspetti di natura meccanica, come lo schema di montaggio e la dimensione dell’albero motore.
Un altro importante aspetto da tenere in considerazione è il tipo di segnale di uscita richiesto. Esso può dipendere da fattori quali tipo di dispositivo collegato all’uscita dell’encoder, tensione di funzionamento del dispositivo connesso e lunghezza di collegamento, oltre alle caratteristiche del collegamento fisico tra i due. Le tipologie più comuni di uscita dell’encoder sono le seguenti: a collettore aperto, push-pull e line driver differenziale. Un’analisi più dettagliata di queste uscite permetterà di comprendere le modalità da seguire per scegliere quella più idonea per la particolare applicazione considerata.
Scelte di progettazione a livello fisico
Si che si tratti dell’uscita in quadratura di un encoder incrementale, un’uscita del polo del motore di un encoder a commutazione, oppure un’interfaccia seriale che utilizza uno specifico protocollo, tutti questi segnali sono digitali e caratterizzati quindi da due stati: alto e basso. In questa discussione l’attenzione sarà focalizzata sul livello fisico e, come si vedrà, il segnale digitale di uscita commuta tra i livelli logici alto e basso qualunque sia il tipo di encoder. Se il dispositivo opera con una tensione di alimentazione di 5 V, l’uscita oscillerà tra 0 V (massa), che rappresenta lo zero logico e 5 V, che rappresenta l’ 1 logico (Fig. 1). L’uscita di un encoder incrementale, per esempio, è una tradizionale onda quadra.

Fig. 1 – Andamento di un’onda quadra digitale a 5 V
L’uscita a collettore aperto è estremamente diffusa tra gli encoder rotativi. L’uscita è così denominata perchè il pin del collettore del transistor di uscita è collegato direttamente a un pin esterno (Figura 2) e non è collegato a nessun altro circuito, come un resistore di pull-up passivo, all’interno del dispositivo. L’uscita può essere pilotata a massa per produrre uno 0 logico in uscita, mentre quando il segnale di uscita deve essere un 1 logico, il transistor è semplicemente lasciato aperto (open) o disconnesso.

Fig. 2 – Schema semplificato dell’uscita a collettore aperto
Al fine di assicurare che il dispositivo connesso possa rilevare lo stato dell’uscita in maniera affidabile, sia che si tratti di uno 0 o di un 1 logici, è necessario ricorrere a un resistore di pull-up esterno (Fig. 3). Quando l’uscita deve essere bassa, il transistor di uscita viene innescato (on) e il potenziale del collettore si sposta verso il basso. Se l’uscita deve essere alta, non scorre corrente della base del transistor e il resistore di pull-up fa aumentare il potenziale del collettore fino al valore della tensione di alimentazione (rail). Poiché la tensione del collettore può essere portata fino a un valore minore o maggiore rispetto a quello della tensione di funzionamento dell’encoder, i progettisti hanno la possibilità di connettere sistemi che operano con differenti tensioni di alimentazione.
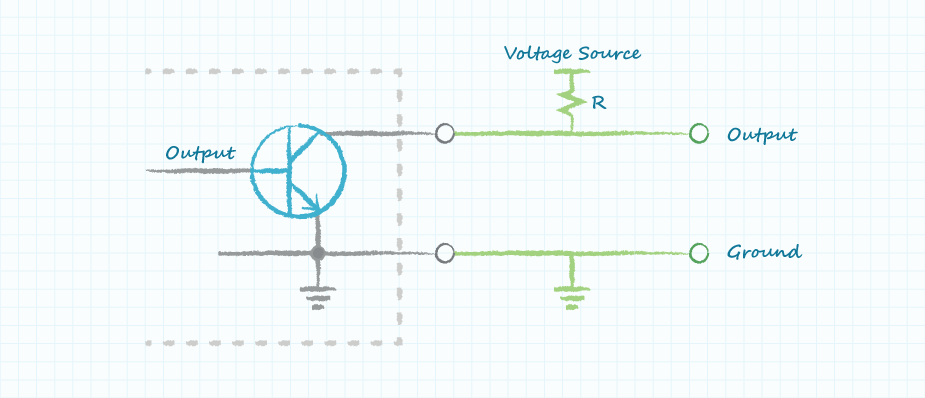
Fig. 3 – Un resistore di pull-up esterno è necessario per assicurare una segnalazione sicura
Nonostante questo elevato livello di flessibilità, l’uscita a collettore aperto evidenzia alcuni svantaggi. Il resistore di pull-up introduce le perdite I2R (potenza dissipata da una resistenza nel tempo) e contribuisce alla formazione della costante di tempo RC assieme alle capacità del circuito (come la capacità parassita del transistor), rallentando la transizione tra gli stati logici. Invece di effettuare una transizione istantanea, gli stati logici cambiano in un periodo di tempo finito (Fig. 4). La pendenza di questa transizione, o slew rate (velocità di variazione), limita la velocità operativa dell’encoder. Uno slew rate minore riduce la velocità di funzionamento, oppure diminuisce la risoluzione nel caso di un encoder incrementale. E’ possibile incrementare lo slew rate con una tensione di pull-up maggiore, utilizzando quindi una resistenza di valore inferiore: in questo caso vi sarà un maggior assorbimento di corrente quando l’uscita è bassa, con il conseguente aumento del consumo di potenza.
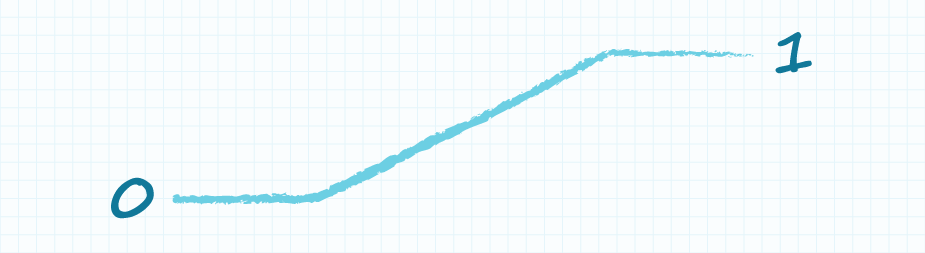
Fig. 4 – Il tempo di transizione del segnale logico è limitato dallo slew rate
Uscita push-pull
Un circuito di uscita push-pull formato da due transistor può ovviare agli svantaggi dell’interfaccia di tipo a collettore aperto. In questa configurazione un transistor è connesso tra l’uscita e la massa, come nel caso del circuito a collettore aperto, mentre il secondo transistor è collegato tra l’uscita e il terminale di alimentazione agendo alla stregua di un pull-up attivo (Fig. 5). Uno schema di questo tipo permette di ottenere uno “slew rate” migliore rispetto a quello conseguibile utilizzando resistori e il pull-up attivo garantisce una minore dissipazione di potenza. Ne consegue che l’uscita push-pull risulta più adatta per tutte quelle applicazioni dove i consumi rappresentano un elemento critico, come ad esempio i dispositivi alimentati a batteria.
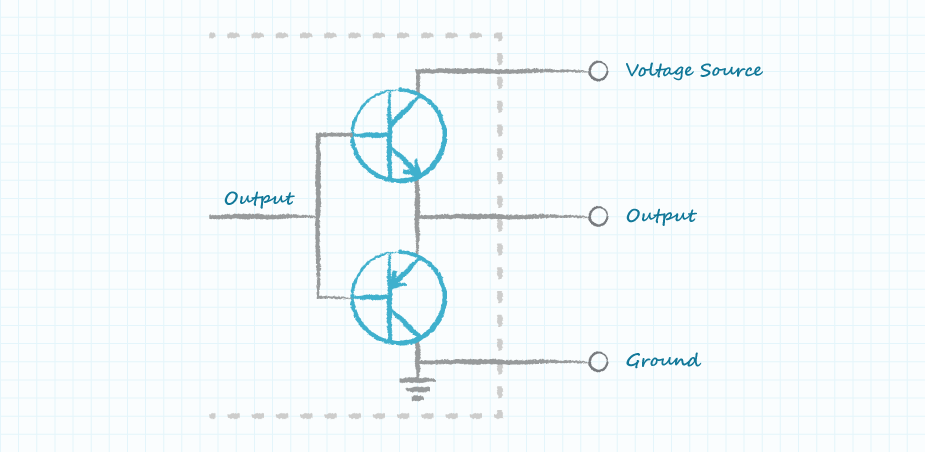
Fig. 5 – Schema dell’uscita di tipo push-pull
Le uscite push-pull sono presenti su tutti gli encoder della serie AMT di tipo single-ended di CUI Devices. Altri dispositivi possono essere connessi alle loro uscite in modo molto semplice senza richiedere pull-up esterni, con conseguente semplificazione delle fasi di collaudo e prototipazione. Nei datasheet degli encoder della serie AMT l’uscita è indicata come CMOS, in modo da indicare come i dispositivi connessi devono interpretare i segnali che vengono forniti. I livelli di tensione effettivi possono variare tra i diversi dispositivi, quindi è sempre opportuno verificare il datasheet nel momento in cui si specificano i componenti.
Uscita differenziale per ambienti rumorosi
Sebbene un encoder con uscita push-pull garantisca maggiore velocità e minori consumi rispetto a un analogo dispositivo con uscita a collettore aperto, l’uscita di tipo single-ended (a terminazione singola) non rappresenta sempre la soluzione migliore per alcune applicazioni. Nel caso i segnali di uscita debbano essere trasmessi tramite cavi su lunghe distanze, oppure l’ambiente operativo è contraddistinto dalla presenza di interferenze e rumore elettrico di notevole entità, un’uscita di tipo differenziale permette di ottenere prestazioni migliori.
Quando i segnali sono trasmessi da un’uscita di tipo single-ended, il ricevitore riferisce il segnale a una massa comune. Nel caso in cui il segnale venga trasmesso su cavi di notevole lunghezza, è possibile che si verifichino errori perché la caduta di tensione può risultare di notevole entità e la capacità dei cavi contribuisce a diminuire lo slew rate.
Il segnalamento di tipo differenziale aiuta a evitare questa problema. Per generare un’uscita differenziale, due transistor vengono configurati in maniera analoga a quella dello schema del circuito push-pull, ma l’uscita comprende due segnali invece di un segnale e la massa (Fig. 6). Uno di questi segnali (il segnale A di figura 6) eguaglia l’uscita dell’encoder originale mentre l’altro segnale (segnale A-) è l’esatto opposto. Questo segnale opposto viene spesso definito come segnale complementare, mentre I due segnali abbinati sono più noti con il nome di coppia differenziale.
Nel momento in cui questa coppia di segnali è trasmessa lungo il cavo, il ricevitore riferisce i due segnali l’uno con l’altro invece di riferire un segnale a massa. Quindi, invece di rispondere a livelli di tensione specifici (alto o basso) relativi a massa, il ricevitore prende in considerazione la differenza di tensione tra i due segnali. L’ampiezza della differenza è doppia rispetto a quella del segnale originale relativo a massa, rendendo quindi il segnale differenziale meno incline agli errori in presenza di rumore o interferenze. Il ricevitore differenziale ricostruisce la coppia di segnali in un segnale di tipo single-ended ai livelli di tensione richiesti dal sistema host. L’utilizzo di transceiver differenziali consente ai dispositivi alimentati con differenti tensioni di operare assieme senza dar luogo a problemi di degradazione del segnale che di solito si verificano quando si utilizzano dispositivi a terminazione singola nelle applicazioni dove sono presenti cavi che coprono lungo distanze.

Fig. 6 – Il driver differenziale genera segnali complementari che sono ricostruiti dal ricevitore
Oltre a provocare la degradazione del segnale quando si utilizzano cavi per lunghe distanze, il rumore può accoppiarsi sui cavi e quindi entrare nel sistema elettrico. Il rumore nei cavi è considerato alla stregua di tensioni di ampiezza variabile, che possono provocare una lettura errata da parte del ricevitore e causare l’introduzione dei errori nei dati prodotti dall’encoder. Poiché le interfacce di tipo line driver differenziali permettono di impedire il verificarsi di tali errori, esse rappresentano la soluzione migliore nel caso di cavi che superano la lunghezza di un metro.
Quando si ricorre ai line driver di tipo differenziale è richiesto un cablaggio di tipo twisted pair (ovvero con conduttori attorcigliati). I due conduttori che trasportano I segnali A e A- sono intrecciati e contengono un numero specifico di spire per una determinata distanza. In questo modo ogni rumore accoppiato su un filo è immediatamente applicato sull’altro. Poiché il ricevitore differenziale sottrae i segnali ricevuti l’uno dall’altro, ciascun rumore presente contemporaneamente sui fili A e A- è cancellato (Fig. 7). Questa funzionalità, denominata reiezione di modo comune, rende le interfacce di tipo line-driver di tipo differenziale particolarmente adatte per l’uso in applicazioni industriale e automotive.
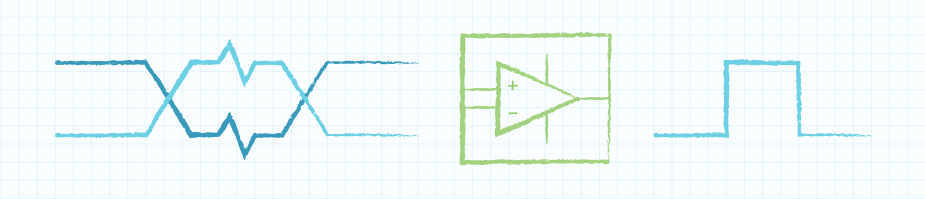
Fig. 7 – Un ricevitore differenziale permette di eliminare il rumore presente su entrambi i segnali
I progettisti possono scegliere l’encoder più adatto per la particolare applicazione considerata analizzando i dispositivi disponibili e valutando pregi e difetti delle differenti tipologie. Gli encoder della linea AMT di CUI Devices con uscite di tipo push-pull semplificano la fase di installazione in un gran numero di applicazioni e contribuiscono a ridurre i consumi di potenza. CUI mette inoltre a disposizione una vasta gamma di dispositivi con uscite line driver differenziali da utilizzare in ambienti caratterizzati dalla presenza di rumore elettrico di elevata intensità oppure in presenza di lunghe distanze di trasmissione.
Risorse utili
Maggiori informazioni sulla gamma di encoder modulari della linea AMT di CUI Devices
Ulteriori informazioni su argomenti relativi agli encoder sono disponibili qui
Jason Kelly Motion Control Design and Applications Engineer (CUI)
Contenuti correlati
-
 Guida alla norma IEC 60601-1-8 e ai sistemi di allarme medicali.
Guida alla norma IEC 60601-1-8 e ai sistemi di allarme medicali.In questo articolo, dopo un esame dello schema generale dello standard IEC 60601-1-8 e dei requisiti chiave per gli allarmi acustici nelle apparecchiature elettromedicali, verranno forniti alcuni esempi di segnali acustici utilizzati in campo medico Leggi l’articolo...
-
 CUI Devices cambia nome e diventa Same Sky
CUI Devices cambia nome e diventa Same SkyCUI Devices ha cambiato il suo nome ed è diventata Same Sky. Il produttore di componenti elettronici ha annunciato infatti il nuovo nome aziendale, accompagnato dal nuovo logo e dai cambiamenti alla parte web. L’azienda si è...
-
 Nuove morsettiere da CUI Devices
Nuove morsettiere da CUI DevicesL’Interconnect Group di CUI Devices ha annunciato una nuova gamma di morsettiere monoposizione con opzioni di diverso colore che possono essere combinate per creare connessioni di cavi codificate. Le serie TBL-0014-750, TBL-0015-750, TBL-0016-1000 sono morsettiere senza viti...
-
 Una panoramica degli encoder per montaggio a pannello
Una panoramica degli encoder per montaggio a pannelloDi Jeff Smoot, Same Sky Esistono molti tipi di encoder. In questo articolo ci concentreremo sugli encoder rotativi per montaggio a pannello: in un primo momento, ne illustreremo funzionamento e specifiche, dopodiché passeremo ad alcune analisi sui...
-
 CUI Devices aggiunge nuovi dissipatori di calore BGA
CUI Devices aggiunge nuovi dissipatori di calore BGAIl Thermal Management Group di CUI Devices ha annunciato l’espansione della sua linea di dissipatori di calore compatibili con dispositivi BGA. La famiglia HSB offre opzioni con materiali come alluminio o rame, finiture anodizzate o nere e...
-
 Gestione termica nei sistemi elettronici: le basi fondamentali
Gestione termica nei sistemi elettronici: le basi fondamentaliIn questo articolo vengono analizzate le potenziali fonti di calore all’interno di un’applicazione elettronica e illustrati vari metodi di gestione termica Leggi l’articolo completo su EO 514
-
 I nuovi buzzer conformi ai requisiti IEC 60601-1-8 di CUI Devices
I nuovi buzzer conformi ai requisiti IEC 60601-1-8 di CUI DevicesL’Audio Group di CUI Devices ha annunciato una nuova linea di cicalini (buzzer) per applicazioni medicali conformi ai requisiti dei segnali di allarme previsti nella norma IEC 60601-1-8. La famiglia CPIM è una gamma di indicatori audio...
-
 Pronto o no – La standardizzazione USB di tipo C è in arrivo
Pronto o no – La standardizzazione USB di tipo C è in arrivoNel panorama in continua evoluzione della tecnologia, un’innovazione è stata al centro dell’attenzione per la sua notevole versatilità, capacità e adozione diffusa: USB Type C. Questo connettore compatto e reversibile ha rivoluzionato il modo in cui trasferiamo...
-
 L’importanza dei materiali di interfaccia termica
L’importanza dei materiali di interfaccia termicadi Ryan Smoot, CUI Devices Viene data molta attenzione alle ventole, ai dissipatori di calore e ai dispositivi Peltier quando si parla di gestione termica, quindi potrebbe essere facile trascurare il modo cruciale in cui sono messi...
-
 Tutto quello che devi sapere sui potenziometri
Tutto quello che devi sapere sui potenziometriChe cosa sono i potenziometri? I potenziometri o “pot”, come sono comunemente chiamati dagli ingegneri, sono essenzialmente resistori che incorporano un meccanismo di regolazione meccanica che consente di modificarne manualmente la resistenza. I resistori, come sappiamo, offrono...
Scopri le novità scelte per te
-
Guida alla norma IEC 60601-1-8 e ai sistemi di allarme medicali.
In questo articolo, dopo un esame dello schema generale dello standard IEC 60601-1-8 e dei requisiti chiave...
-
CUI Devices cambia nome e diventa Same Sky
CUI Devices ha cambiato il suo nome ed è diventata Same Sky. Il produttore di componenti elettronici...

News/Analysis Tutti ▶
-
 congatec compie 20 anni
congatec compie 20 annicongatec ha recentemente celebrato il suo ventesimo anniversario. Coerentemente con la propria visione, l’azienda...
-
 Partnership tra Advantech e ADATA per gli AMR
Partnership tra Advantech e ADATA per gli AMRAdvantech ha annunciato una partnership con ADATA per lo sviluppo di un robot mobile...
-
 La connettività in ambienti difficili analizzata in un eBook di Mouser e Cinch
La connettività in ambienti difficili analizzata in un eBook di Mouser e CinchMouser Electronics, in collaborazione con Cinch Connectivity Solutions, ha pubblicato un nuovo eBook intitolato...
Products Tutti ▶
-
 Panasonic Industry annuncia un nuova serie di relè
Panasonic Industry annuncia un nuova serie di relèPanasonic Industry ha recentemente presentato un nuovo relè PhotoMOS progettato per apparecchiature di misurazione,...
-
 Panasonic migliora la produzione di PCB
Panasonic migliora la produzione di PCBPanasonic Connect Europe ha realizzato il nuovo modular mounter NPM-GW, un modulo di montaggio...
-
 Innodisk: la memoria per potenziare l’IA
Innodisk: la memoria per potenziare l’IAInnodisk ha annunciato la sua serie di DRAM DDR5 6400, appositamente realizzata per applicazioni...


{kind=link}