

















 25 / 86
25 / 86

TECH INSIGHT
ELECTRICAL VEHICLE
25
- ELETTRONICA OGGI
459
-
GENNAIO
/
FEBBRAIO
2017
Sebbene queste considera-
zioni valgano per i motori in
sé, per definizione valgono
anche per i circuiti di pilo-
taggio associati dal momento
che, a tutti gli effetti, essi agi-
scono come una cosa sola.
Per raggiungere questi obiet-
tivi, vengono utilizzati circuiti
di pilotaggio sempre più inte-
grati e sofisticati che permet-
tono di includere in essi mag-
giori funzionalità.
Tipicamente, i moderni circu-
iti di pilotaggio per motori a
spazzole comprenderanno il
circuito fondamentale a pon-
te H high-side o low-side, ri-
chiesto per pilotare gli stadi
del MOSFET; alcuni comprendono anche uno stadio
di potenza per consentire il pilotaggio diretto di pic-
coli motori senza la necessità di ricorrere a MOSFET
esterni. Integrando lo stadio di potenza direttamente
nel circuito di pilotaggio, è molto più facile montare
circuito di pilotaggio e motore in uno stesso blocco,
nei casi in cui lo spazio disponibile sia limitato. I cir-
cuiti di pilotaggio per motori a spazzole comprendono
inoltre un numero di funzioni di sicurezza come il rile-
vamento delle sovratemperature, delle sovratensioni
e sottotensioni, e dei cortocircuiti.
I circuiti di pilotaggio per motori brushless offrono tut-
te le funzionalità sofisticate richieste per sfruttare al
meglio i motori moderni, a prescindere dal fatto che
siano dotati di sensori incorporati o, come accade
più comunemente, che siano privi di sensori. I tipi più
semplici sono basati su un microcontrollore esterno
per fornire il segnale PWM con la corretta fasatura,
mentre i tipi più sofisticati ricevono una tensione in
continua o un segnale PWM a fase singola per indi-
care la velocità di rotazione desiderata e generare la
fasatura di basso livello richiesta per controllare il mo-
tore. Questi circuiti di pilotaggio comprendono inoltre
funzioni di sicurezza, come la protezione da sovracor-
renti, sovratensioni e sovratemperature.
Man mano che i veicoli si affidano sempre più all’elettro-
nica, è importante non solo che i dispositivi siano con-
formi ai requisiti del settore automobilistico, ma che l’in-
tera filosofia di progetto sia attenta a progettare la sicu-
rezza sin dall’inizio, soprattutto se si parla di dispositivi
utilizzati in applicazioni critiche del punto di vista della
sicurezza (safety-critical), come il servosterzo (Fig. 2).
Un controller a ponte H avanzato
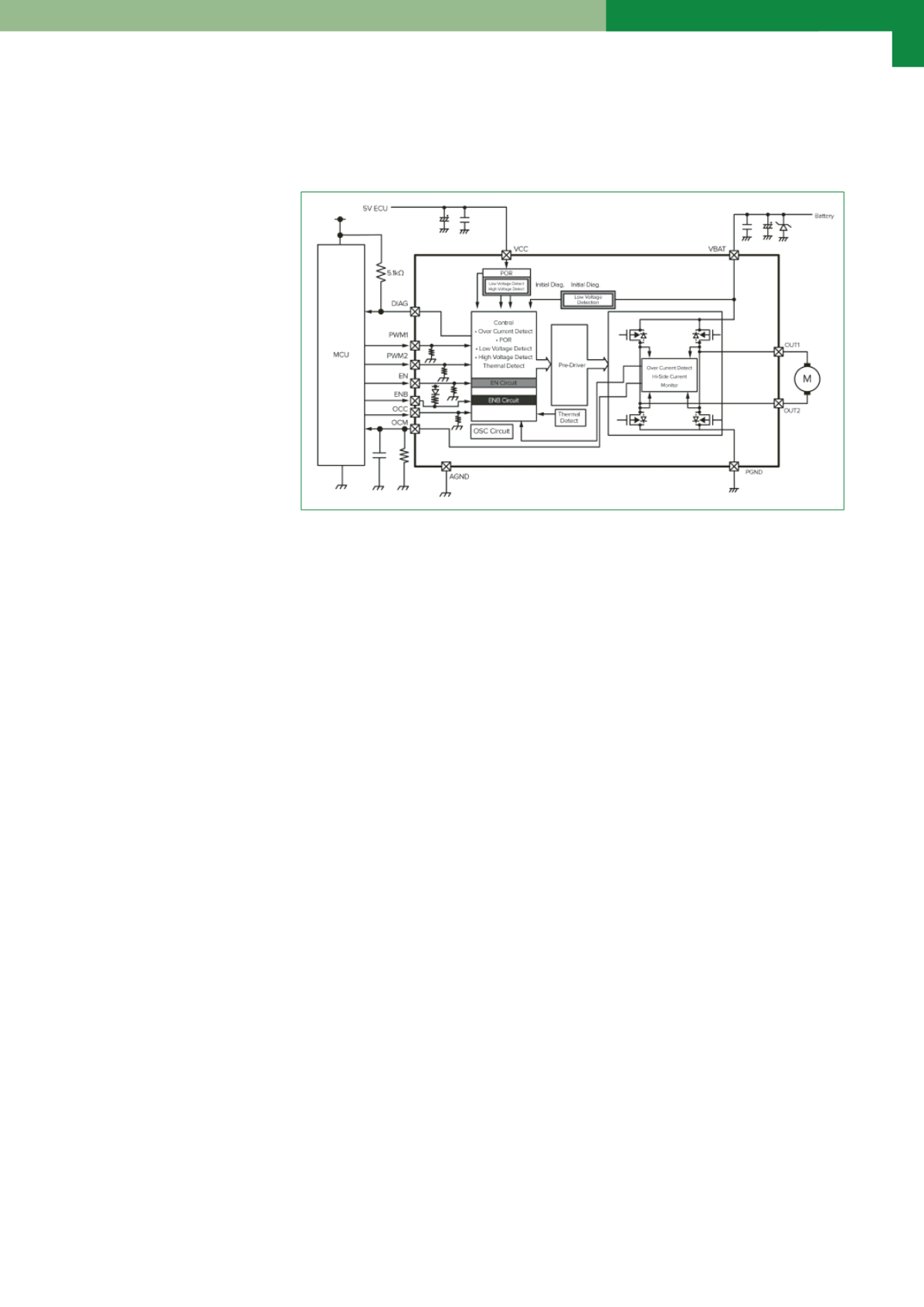
Un esempio di un moderno controller a ponte H a ca-
nale singolo per motori a spazzole è il circuito di pilo-
taggio Toshiba TB9051FTG (Fig. 3). Studiato per appli-
cazioni a bassa potenza, come il controllo elettronico
dell’acceleratore, gli alzacristalli elettrici, il controllo
della valvola del motore, il controllo degli specchietti
laterali e dei sedili elettrici, questo versatile dispositi-
vo è utilizzabile sia nel vano motore che nell’abitacolo.
Disponibile in un packge P-QFN28 (6 mm x 6 mm) e
utilizzabile in ambienti con temperature fino a 125 °C,
il dispositivo comprende uno stadio di uscita a ponte
H in grado di erogare fino a 5A e garantisce un’eleva-
ta efficienza con una bassa resistenza di conduzione
(Ron) pari a 450 m . Il circuito di pilotaggio comple-
tamente integrato include la protezione dalle sovra-
temperature, dalle sovratensioni e dalle sottotensioni,
nonché svariati altri meccanismi di autodiagnostica.
La modulazione PWM integrata funziona da 1 kHz a 20
kHz per fornire un ampio controllo dei valori di veloci-
tà e di coppia dei motori. Il dispositivo lavora con una
semplice alimentazione di 5V prelevata dalla centrali-
na per tutte le funzioni principali, mentre lo stadio di
potenza accetta direttamente un’alimentazione in cor-
rente continua fino a 28V.
Come per tutti i circuiti di pilotaggio di Toshiba, anche
per il modello TB9051FTG è disponibile una scheda di
valutazione complementare che include tutti i compo-
nenti necessari e le interfacce richieste per sviluppare
ed effettuare il debug in tempi rapidi e in modo affi-
dabile il progetto di un sofisticato sistema di controllo
del motore per applicazioni automobilistiche.
Fig. 3 – Schema a blocchi del circuito di pilotaggio ad alto grado di integrazione TB9051FTG per motori
a spazzole