

















 29 / 104
29 / 104

ANALOG/MIXED SIGNAL
Clock IC
29
- ELETTRONICA OGGI 452 - MARZO 2016
HCSL o LVPECL) o come due uscite
single-ended (LVCMOS).
Grazie a Timing Commander è pos-
sibile eseguire la programmazione
in-system del componente via I2C
all’accensione e bypassare la confi-
gurazione memorizzata nella OTP, se
necessario, per soddisfare eventuali
modifiche apportate a livello di speci-
fiche o di prodotto. L’utente finale può
anche impostare parametri di disper-
sione dello spettro indipendenti per
applicazioni che adottano tale tecnica
per la riduzione delle interferenze elet-
tromagnetiche.
La famiglia VersaClock 5 di IDT affron-
ta e risolve delle problematiche chiave
dei generatori di clock. La combinazio-
ne tra molteplici uscite, un jitter estre-
mamente contenuto e rumore di fase e
consumo di potenza ridotti con la pro-
grammabilità comporta vantaggi tan-
gibili per i progettisti e gli utilizzatori
del prodotto. Grazie a essa è possibile
accelerare il ciclo di progetto e sempli-
ficare le fasi di sviluppo e validazione
come la ricerca degli errori e i test dei
margini.
Inoltre, il problema di approvvigiona-
mento dei quarzi viene ridotto, miglio-
rando al contempo l’affidabilità grazie
ad un minore numero di componenti
richiesti. Lo spazio occupato sulla
scheda, la BOM e il costo vengono ri-
dotti.
Componenti diversi
per soddisfare svariate esigenze
I
componenti
della
famiglia
IDT5P49V59XX VersaClock 5 si dif-
ferenziano leggermente in termini di
funzionalità, configurazioni e specifiche. Per analizzare le
potenzialità e la versatilità del componenti di questa famiglia
si prenda ad esempio il mod. IDT5P49V5925. Questo compo-
nente offre un clock LVCMOS di riferimento a 25 MHz buf-
ferizzato, oltre a quattro uscite indipendenti funzionanti nel
range da 1 MHz a 200 MHz. Queste uscite hanno uscite pro-
grammabili singolarmente (1,8V, 2,5V e 3,3V), abilitazione
delle uscite, controllo dello slew rate e funzionalità spread-
spectrum. Il rumore di fase e il jitter rms integrato sono in-
feriore a 0,7 picosecondi (610 femtosecondi per l’esattezza),
compreso il cross-talk interno, come mostrato nel grafico
dello spettro di questa uscita misurato con un analizzatore
di segnali (Fig. 5).
A causa delle frequenze elevate e del jitter molto contenuto,
non è semplice simulare il comportamento di questi compo-
nenti o misurarne le prestazioni. Di conseguenza, IDT for-
nisce i modelli IBIS. In aggiunta, sono disponibili schede di
valutazione per tutti i membri della famiglia per semplificare
il lavoro del progettista, in particolare quando impiegate in-
sieme alla piattaforma software Timing Commander (Fig. 6).
J
itter
:
un termine semplice
per un comportamento complesso
Non si può parlare di segnali di clock senza prendere in considerazione il jitter, un parame-
tro che ogni sistema con un clock ad alta frequenza e ne limitano le massime prestazioni
raggiungibili. Nel dominio del tempo, il jitter appare come uno sfasamento continuo at-
torno alla forma d’onda ideale, mentre nel dominio della frequenza è descritto da compo-
nenti spurie che si aggiungono al picco della frequenza fondamentale. Le indicazioni nei
domini del tempo e della frequenza sono perfettamente equivalenti e l’adozione di uno o
dell’altro dominio dipende dall’applicazione.
Il jitter è un argomento complesso, la sua presenza è dovuta a molteplici sorgenti e ha un
impatto sull’intero sistema. Può essere causato da imperfezioni del generatore di clock (ti-
picamente un quarzo o un clock esterno di riferimento) o degli oscillatori ad esso collegati,
dal rumore di fase, da altre sorgenti di rumore esterne, dall’accoppiamento sul circuito
stampato e dalle interferenze elettromagnetiche. Poiché esistono molti tipi di jitter, esso
può essere indicato con diverse unità di misura, come illustrato in tabella 1 insieme ai pa-
rametri principali che lo caratterizzano come il valormedio, il valore rms o il valore di picco.
Nei sistemi moderni ad alta velocità e larga banda, il jitter viene normalmente misurato in
picosecondi o millesimi di unità di periodo (UI).
Il jitter costituisce uno dei fattori principali che introducono non idealità nei sistemi, come
errori di temporizzazione nel campionamento delle radio definite dal software (SDR) o un
aumentodel tassodi errori (BER) prodottodall’interferenza tra simboli e dalla conseguente
chiusura del diagramma ad occhio nella trasmissione dati. I dettagli circa i tipi di jitter, le
loro sorgenti e i parametri che li caratterizzano sono discussi in tutorial dettagliati, come
AN-815 “Understanding Jitter Units “ e AN-827, “Application Relevance of Clock Jitter”.
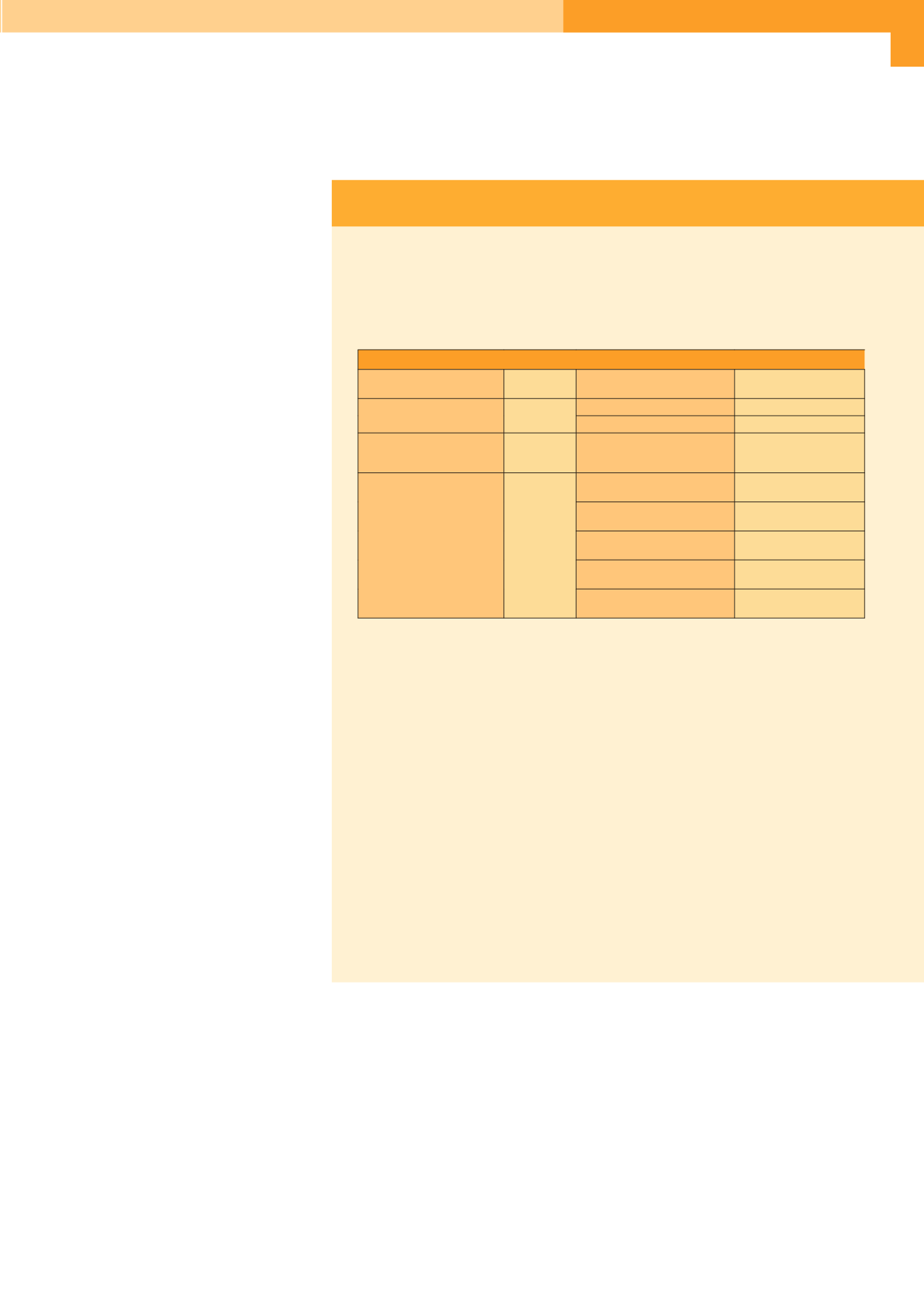
Tabella 1 – Esempi di vari tipi di jitter in funzione dell’applicazione
Application
(examples)
Relevant
Jiitter
Specification
(units)
Qualifier
Synchronous Interface
Synchronous Logi
c
Period
Jiiter
Pk-Pk Period Jiiter (time)
Bit Error Rate
RMS Period Jiiter (time)
10K cycles
Micro Complex
Motherboard Design
Spread Spectrum
High
Freq Jiiter
C2C Jiiter (time)
1K consecutive cycles
High Speed SerDes
ADC (RF Signal Chain)
Frequency
Domain Jiiter
Phase Noise, PN Plot (dBc/Hz)
(Frequency Domain Measurement)
Carrier Offset Freq
RMS Phase Jiiter (time)
(extrapolated from a PN Plot)
Integration band (i.e. fileter)
Pk-Pk Total Jiiter UI (time)
(SerDes Eye Closure Specification)
Random Jiiter Budget,
Integration Band (i.e. filter)
Spurs (dBc)
(Deterministic Jiiter)
Carrier Offset Freq
“Additive” RMS Phase Jiiter (time)
(Fan Out Buffer “relevance”)
Integration Band (i.e. filter)