Infotainment automotive con ARM e Linux
I costruttori di sistemi In-Vehicle Infotainment (IVI) scelgono le architetture ARM e i sistemi operativi Linux per garantire l’interoperabilità fra i prodotti e la competitività nei costi oltre che la massima ergonomia e comodità per i conducenti e i passeggeri
-

- Tweet
- Pin It
- Condividi per email
-
L’industria automobilistica si sta orientando sulle tecnologie a basso consumo, basso costo e massima utilizzabilità delle architetture ARM e dei sistemi operativi Linux per realizzare sistemi di In-Vehicle Infotainment (IVI) ricchi di sofisticate funzionalità.
La popolarità di Linux è in effetti legata alla sua impostazione open source che permette a tutti i costruttori di far parte di una grande community dedicata allo sviluppo delle applicazioni con caratteristiche e prestazioni compatibili e competitive sul mercato.

Fig. 1 – La GENIVI Alliance pronostica per le applicazioni In-Vehicle Infotainment la connettività 4G e GUI con riconoscimento vocale e gestuale, display 3D touch-screen e Head-Up Display
Nel settore automotive, tuttavia, la difesa della proprietà intellettuale può spingere i costruttori a personalizzare le applicazioni Linux in modo da ostacolarne la manutenzione e l’aggiornamento da parte dei concorrenti e questo può diventare un impedimento nella diffusione di quelle tecnologie che invece dovrebbero imporsi come standard di riferimento.
Inoltre, i sistemi basati su Linux hanno bisogno di essere aggiornati frequentemente e ciò può comportare una periodica fastidiosa occupazione delle comunicazioni attraverso la rete cellulare che collega l’automobile con la conseguenza di impedire o per lo meno rallentare le altre funzionalità installate che necessitano del Web come per esempio le funzioni IVI.
Una plausibile soluzione consiste nel realizzare sistemi IVI su schede e software compatibili e offrire il tutto in Board Support Package (BSP) completi di piattaforme di sviluppo e valutazione uguali per tutti gli OEM, nonostante l’architettura aperta del sistema operativo di base. In questo modo si può promuovere il riutilizzo dei sistemi IVI sia nei moduli hardware che li compongono sia nel software che li gestisce, migliorando l’efficienza del ciclo di sviluppo e perciò anche il time-to-market per l’introduzione in commercio dei nuovi prodotti.
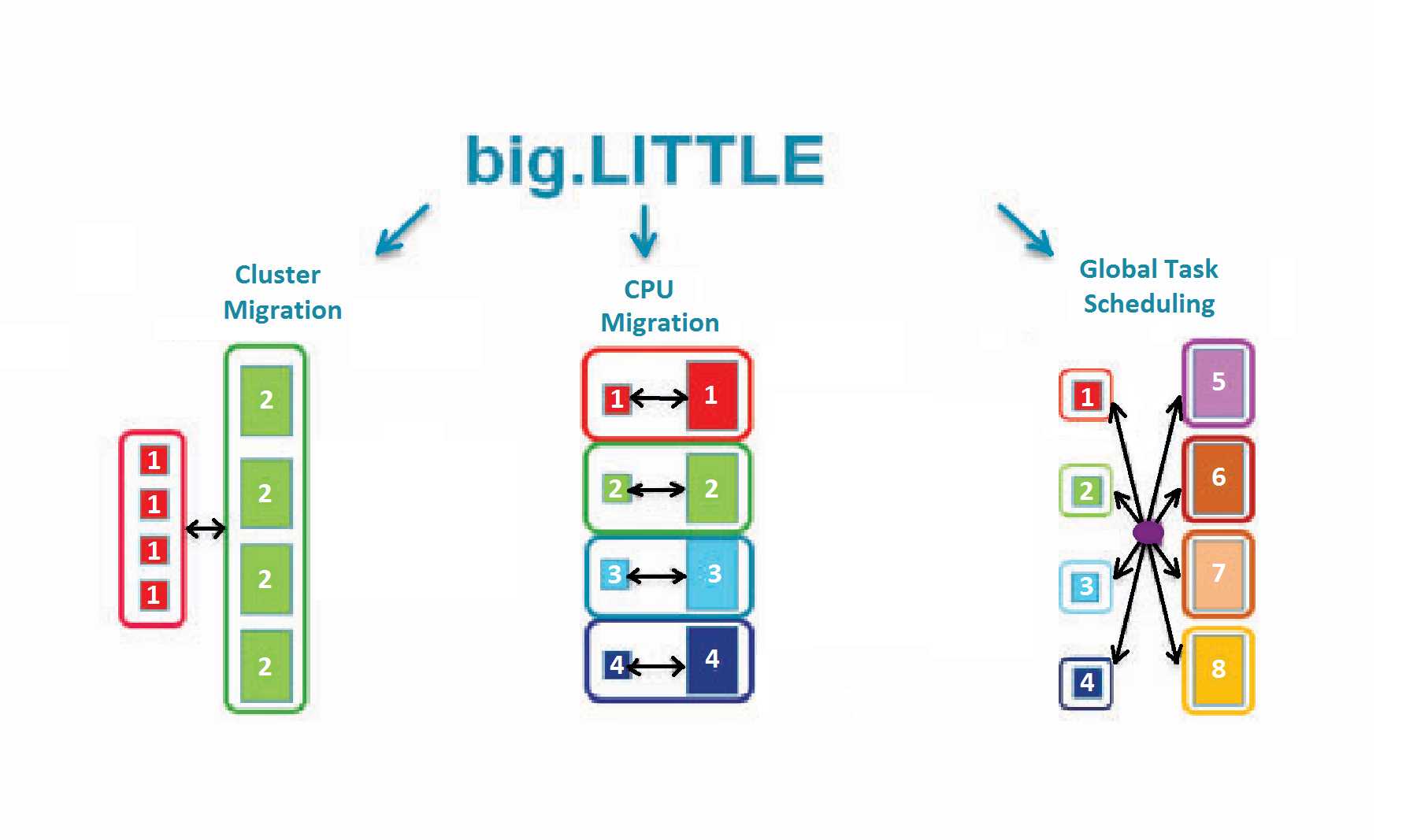
Fig. 2 – Nei core ARM big.LITTLE ci sono tre modalità di gestione delle task multiple che consentono di realizzare sistemi IVI energeticamente efficienti, efficaci nella connettività e competitivi nei costi
L’alleanza non-profit GENIVI è stata fondata nel 2009 proprio a tal scopo ed è formata da alcuni costruttori di automobili e alcuni protagonisti dell’elettronica fra cui ARM, Freescale, Intel, Magneti Marelli, nVidia, Renesas e Texas Instruments. L’intento dei gruppi di lavoro GENIVI è quello di promuovere tecnologie per prodotti IVI che siano alla portata di tutti gli OEM ed è per lo stesso motivo che più recentemente sono state scelte come fondamentali le tecnologie Linux e Android. Nel 2012 è stata adottata la piattaforma Automotive Grade Linux (AGL) e subito dopo la Open Automotive Alliance (OAA) basata su Android, ma sono già state introdotte anche soluzioni Free and Open Source (FOSS) compatibili basate sui sistemi operativi più commerciali come Windows, QNX e iOS.
Core trasformisti
Per le applicazioni IVI c’è anche da considerare che devono soddisfare criteri di robustezza adeguati alle automobili e perciò una tolleranza termica minima fra -40 e +85 °C, accomunata da una buona immunità elettromagnetica, mentre nel contempo è indispensabile che offrano un livello di prestazioni assai superiore a quello di un tablet o di un potente smartphone, dove però i vincoli di robustezza non sono così stringenti.
Dato che la CPU è sovente l’elemento che dissipa più calore pur dovendo eseguire la maggior parte dell’elaborazione a elevate prestazioni, ne consegue che diventa fondamentale ottimizzarne il funzionamento al meglio equilibrando i consumi di potenza per quanto possibile. A tal proposito diventano strategiche sia la qualità dell’architettura hardware della CPU sia l’efficienza del sistema operativo che la gestisce perché sono proprio questi i due fattori che possono determinare il successo di un sistema IVI automotive.

Fig. 3 – Texas Instruments offre una piattaforma completa di supporti che consentono di realizzare sistemi IVI automotive dotati di connettività USB 3.0 e trasmissione di potenza wireless per la ricarica senza fili di tablet e smartphone
Funzioni come la Dynamic Voltage and Frequency Scaling (DVFS) oppure l’Adaptive Voltage Scaling (AVS) sono essenziali per adeguare l’attività della CPU alle esigenze di elaborazione di volta in volta richieste e perciò vengono oggi installate su tutti i nuovi core ARM nei quali si possono trovare anche funzioni adattative più sofisticate come il clock/core gating e la tecnologia proprietaria big.LITTLE.
Negli ARM Big.LITTLE si trovano integrati insieme un core “big” con prestazioni sofisticate per le task più esigenti e un core “little” a basso consumo per le task più leggere. I due core sono connessi dal bus CoreLink Cache Coherent Interconnect CCI-400 e compongono l’architettura ARMv7-A quando affiancano un Cortex-A15 o un Cortex-A17 come big e un Cortex A7 come little, mentre diventano l’architettura ARMv8-A se utilizzano un big Cortex-A57 e un little Cortex-A53.
Questa impostazione consente di supportare un’ampia varietà di software e, in particolare, le tre impostazioni base per il sistema operativo, che può gestire simultaneamente tutte le task singolarmente una a una, oppure parallelamente una per ogni motore di calcolo, oppure insieme dividendo le task in slot temporali multiplexati con una procedura detta Global Task Scheduling.
L’impostazione a doppio core degli ARM big.LITTLE consente di schedulare le applicazioni e risparmiare risorse di calcolo mentre si contengono al minimo i consumi. ARM ha investito molto nella ricerca e sviluppo di queste soluzioni che sono determinanti per realizzare piattaforme IVI energeticamente efficienti, efficaci nella connettività ed estremamente competitive sul mercato.

Fig. 4 – Schema a blocchi del processore DRA746 Jacinto 6 dotato di core doppio ARM Cortex-A15, doppia IMU ARM Cortex-M4 e core grafico 3D PowerVR SGX544 con supporto video Full HD
In tal senso una scelta ben precisa degli esperti ARM è stata quella di promuovere presso i partner GENIVI e soprattutto con Linux, ma anche con QNX e Microsoft, la messa a punto di adeguati set di building block software che possano essere utilizzati da tutti senza rischi in modo da favorirne l’interoperabilità. Fra essi, innanzi tutto, i browser per i collegamenti Web e le interfacce utente grafiche GUI che devono avere funzionalità molto più evolute rispetto a quelle per PC o smartphone ma nel contempo devono anche essere utilizzabili nel modo più semplice e immediato possibile da parte del conducente e dei passeggeri a bordo auto.
Prospettive IVI
I fattori che saranno probabilmente trainanti per le tecnologie IVI sono stati individuati dalla GENIVI Alliance con un gran numero di interviste sull’argomento fatte sia agli addetti ai lavori sia ai potenziali utilizzatori che vorrebbero nel loro sistema IVI a bordo auto, innanzi tutto, una tecnologia di riconoscimento vocale sufficientemente avanzata per poter azionare tutti i comandi senza togliere le mani dal volante né distrarsi dalla guida. Inoltre, per lo stesso motivo desiderano schermi grafici 3D facili da visualizzare, dotati di touch screen e auspicabilmente anche di un sistema di riconoscimento gestuale che li possa rendere immediati e comodi da usare mentre c’è anche una minoranza che sarebbe già propensa a utilizzare gli head-up display (HUD o display “a testa alta”).
Si tratta di visori trasparenti a sovrimpressione che si montano sopra il cruscotto frontale degli aerei, oppure direttamente sull’elmetto del pilota come visiere o monocoli e vengono utilizzati per poter visualizzare rapidamente e senza spostare la testa le informazioni più importanti come l’assetto, la velocità o il consumo di carburante. In effetti, è una tecnologia già ampiamente sperimentata ma solo sui piloti d’aereo che hanno un addestramento sicuramente più adeguato rispetto al guidatore d’automobile medio, per il quale il peggioramento dell’angolo di visione che ne deriva potrebbe essere considerato fastidioso. In ogni caso gli HUD potrebbero essere più indicati per assistere il conducente nel migliorare la sicurezza e l’efficacia della sua guida, mentre le funzioni tipiche dei sistemi di infotainment potrebbero rimanere su display separati, proprio per evitare distrazioni.
Naturalmente ogni sistema di IVI dovrà essere provvisto delle porte di interfaccia più popolari come SD Card, USB e Bluetooth mentre per la connettività in rete senza fili ci sono più opzioni il cui orientamento comune è che, seppur gradualmente, ogni veicolo possa diventare esso stesso un hot spot dentro cui notebook, laptop, tablet e smartphone possano spartirsi la banda disponibile.
La connessione in rete del veicolo dovrebbe essere realizzata attraverso le reti cellulari 4G prossime venture come LTE e WiMax che supporteranno anche i collegamenti Vehicle-to-Vehicle e Vehicle-to-Roadside V2V/V2R finalizzati allo scambio delle segnalazioni di allarme in caso di blocchi del traffico o incidenti sia fra le autovetture sia con opportuni centri info dislocati nelle principali arterie stradali. Fra i sistemi di In-Vehicle Infotainment, infatti, sono da considerare anche gli Advanced Driver Assistance Systems (ADAS), che miglioreranno i comportamenti alla guida dei conducenti, ottenendo un’auspicabile forte diminuzione degli incidenti e nel contempo flussi di traffico meno congestionati e perciò più celeri.
Un’offerta completa
Texas Instruments propone sette nuovi prodotti per l’infotainment automotive basati sul processore DRA74x Jacinto 6 presentato all’inizio di giugno e caratterizzato dall’architettura OMAP 5 composta da un core doppio ARM Cortex-A15, due Image Processing Unit (IMU) ARM Cortex-M4 e un core grafico PowerVR SGX544 3D. Il dispositivo viene fornito anche nella versione più leggera, DRA72x Jacinto 6 Eco, che si differenzia per il core Cortex-A15 singolo.
Entrambi hanno a bordo un DSP C66x e supportano il formato video Full HD da 1920×1080 pixel e 60 frame al secondo, la radio analogica e digitale (DAB e HD Radio) e la grafica 3D nonché le interfacce ad alta velocità USB 3.0, Sata 2, PCI Express Gen2 e Gigabit Ethernet. Con i sette nuovi chip di interfaccia i due Jacinto 6 hanno ora il supporto di una piattaforma completa per lo sviluppo e la realizzazione di sistemi IVI all’avanguardia nelle caratteristiche multimediali e telematiche.
Il Power Management Integrated Circuit PMIC TPS659039-Q1 gestisce l’alimentazione dei sistemi IVI controllando accuratamente la temperatura e adattando il livello della tensione all’effettivo consumo. Questo PMIC si affianca ai due traslatori di livello di tensione SN74AUP1T34-Q1 e TXS0102-Q1 che consentono di agganciare svariati tipi di periferiche con le loro rispettive tensioni di alimentazione da 1 a 3,3 V per il primo che ha una sola uscita e da 1,8 a 5,5 V per il secondo che ha due canali.
Per la connettività ci sono gli USB 3.0 Hub Controller TUSB8041-Q1 a quattro porte e TUSB8020-Q1 a due porte nonché il bridge USB-to-SATA TUS9261-Q1 basato su core ARM Cortex-M3, i quali consentono di collegare fino a quattro terminali o apparecchi a una velocità massima di 5 Gbps, soddisfacendo così l’esigenza di utilizzare in auto le applicazioni multimediali su tablet, smartphone o videogames. Infine, il trasmettitore di potenza wireless bq500414Q certificato come AEC-Q100 Qi 1.1-Compliant dal Wireless Power Consortium (WPC) consente di disporre all’interno dell’auto di un segnale di potenza (fino a 12 V) che consente di caricare senza fili qualsiasi apparecchio o dispositivo dotato di avvolgimento A6. Tutti questi prodotti sono già in produzione per volumi.
Gianluca Scotti
Contenuti correlati
-
 Mercato automotive: previsioni per il 2025
Mercato automotive: previsioni per il 2025A cura di Wayne Lyons, senior marketing director, Automotive, AMD Il settore dell’automotive è vicinissimo a una trasformazione epocale. Guidata da una convergenza di fattori – incessanti progressi tecnologici, mutevoli esigenze dei consumatori e crescente consapevolezza dell’impatto...
-
 USB Power Delivery: efficienza e convenienza per l’infotainment a bordo veicolo
USB Power Delivery: efficienza e convenienza per l’infotainment a bordo veicoloI controllori USB PD di TI sono una soluzione su chip singolo che permette di migliorare l’efficienza e la densità di potenza dei prodotti USB destinati al mondo automotive Leggi l’articolo completo su EO Power 36
-
 Il nuovo centro di distribuzione dei prodotti di TI
Il nuovo centro di distribuzione dei prodotti di TITexas Instruments (TI) ha aperto un nuovo centro per la distribuzione dei prodotti a Dreieich, nei pressi di Francoforte. Il nuovo impianto, che ha un’estensione di 9.000 metri quadrati, dispone di nuove funzionalità di automazione. Può infatti...
-
 I compilatori HighTec supportano l’IP RISC-V di Andes
I compilatori HighTec supportano l’IP RISC-V di AndesHighTec EDV-Systeme, fornitore di compilatori per il settore automotive, ha annunciato il supporto per l’IP RISC-V di Andes nel suo compilatore C/C++ ottimizzato per il mercato automotive. Il compilatore HighTec C/C++ è basato sulla tecnologia open source...
-
 Progettazione di un circuito di precarica attiva con condensatore DC-Link ad alta tensione
Progettazione di un circuito di precarica attiva con condensatore DC-Link ad alta tensioneQuesto articolo presenta il processo di progettazione necessario per calcolare gli adeguati valori dei componenti che contribuiscono a ottenere il profilo di carica desiderato Leggi l’articolo completo su EO 521
-
 I miglioramenti nella tecnologia RFID danno origine a nuove applicazioni
I miglioramenti nella tecnologia RFID danno origine a nuove applicazioniL’identificazione a radiofrequenza (RFID) è una tecnologia consolidata che viene impiegata da molti anni, con l’introduzione dei primi esempi di transponder RF passivi che risale agli anni 70. Probabilmente la usate tutti i giorni senza accorgervene, ma...
-
 Come migliorare la sicurezza negli inverter di trazione dei veicoli elettrici
Come migliorare la sicurezza negli inverter di trazione dei veicoli elettriciI progettisti di veicoli elettrici possono aumentare la sicurezza e l’affidabilità dei sistemi a inverter di trazione monitorando la soglia di tensione del gate Leggi l’articolo completo su EO520
-
 Intel porta le sue GPU Arc nelle automobili
Intel porta le sue GPU Arc nelle automobiliIntel è entrata nel segmento delle GPU discrete per applicazioni automotive presentando la sua prima unità dGPU per questo settore. Le GPU sono quelle con architettura Arc e i prodotti inizieranno a essere distribuiti commercialmente nei veicoli...
-
 Finanziamenti per 1,6 miliardi per Texas Instruments
Finanziamenti per 1,6 miliardi per Texas InstrumentsTexas Instruments (TI) ha firmato un memorandum d’intesa preliminare non vincolante con il Dipartimento del Commercio degli Stati Uniti per un finanziamento diretto fino a 1,6 miliardi di dollari. Questa operazione rientra nell’ambito del CHIPS and Science...
-
 eMCOS POSIX di eSOL supporta il processore automotive Arm Cortex-R82AE
eMCOS POSIX di eSOL supporta il processore automotive Arm Cortex-R82AEeSOL ha annunciato il supporto per il processore per il mercato automotive Arm Cortex-R82AE tramite il suo sistema operativo eMCOS POSIX. Questo risultato è stato reso possibile utilizzando prototipi virtuali dell’IP di Arm sotto Arm Virtual Hardware...
Scopri le novità scelte per te
-
Mercato automotive: previsioni per il 2025
A cura di Wayne Lyons, senior marketing director, Automotive, AMD Il settore dell’automotive è vicinissimo a una...
-
USB Power Delivery: efficienza e convenienza per l’infotainment a bordo veicolo
I controllori USB PD di TI sono una soluzione su chip singolo che permette di migliorare l’efficienza...

News/Analysis Tutti ▶
-
 EPC presenta un nuovo reference design
EPC presenta un nuovo reference designEfficient Power Conversion (EPC) ha presentato la scheda di valutazione EPC91200, un reference design...
-
 Samtec premia Mouser Electronics
Samtec premia Mouser ElectronicsMouser Electronics ha annunciato di aver ricevuto il premio Global High Service Distributor of...
-
 I nuovi induttori di Chemi-Con da TTI
I nuovi induttori di Chemi-Con da TTITTI IP&E – Europe ha comunicato la disponibilità della serie FW di induttori del...
Products Tutti ▶
-
EPC presenta un nuovo reference design
Efficient Power Conversion (EPC) ha presentato la scheda di valutazione EPC91200, un reference design...
-
I nuovi induttori di Chemi-Con da TTI
TTI IP&E – Europe ha comunicato la disponibilità della serie FW di induttori del...
-
 Infineon presenta i microntrollori PSOC Control
Infineon presenta i microntrollori PSOC ControlInfineon Technologies ha annunciato la disponibilità di PSOC Control, una nuova famiglia di microcontrollori...

