

















 88 / 102
88 / 102

XIV
Lighting
LIGHTING 15 -
NOVEMBRE/DICEMBRE 2017
La modalità ACM (advanced current
mode) a compensazione interna è una
nuova topologia di controllo di Texas
Instruments, che supporta la sincronizza-
zione e la modulazione a frequenza fissa
con compensazione interna. Fondamental-
mente, è simile all’emulazione della modalità
di controllo a picco di corrente (PCM, peak-current-mo-
de), che mantiene la stabilità in un intervallo di tensioni di
ingresso e di uscita per una rapida risposta ai transitori. Ciò
che distingue la topologia ACM è il fatto che si tratta di uno
schema di controllo in modalità a picco di corrente basato
su rampa; esso infatti genera internamente una rampa per
ottenere una frequenza fissa senza utilizzare una compen-
sazione esterna. Inoltre, questa modalità è caratterizzata da
una buona immunità alle variazione dello stadio di poten-
za (induttore e condensatore) e il suo utilizzo comporta
numerosi vantaggi, che verranno descritti di seguito.
Perché utilizzare l’ACM a compensazione interna
Anche se esistono topologie di controllo che supportano
la frequenza fissa reale o la frequenza pseudo-fissa, senza la
necessità di una rete di compensazione esterna. Tuttavia, il
loro utilizzo presenta alcuni inconvenienti.
La maggior parte dei convertitori esterni a frequenza fissa
reale/senza compensazione esterna è basata sulla tradizio-
nale modalità a picco di corrente, che prevede l’integrazio-
ne del circuito di compensazione all’interno del circuito,
ottimizzato per soddisfare le esigenze di svariate applica-
zioni. Poiché la compensazione interna deve garantire la
copertura di diversi intervalli di stabilità, risulta molto diffi-
cile ottimizzare il circuito interno e la compensazione della
pendenza nel caso sia necessario ottenere una rapida rispo-
sta ai transitori. La larghezza di banda del loop deve esse-
re limitata anche per soddisfare le esigenze di parecchie
applicazioni. Di solito, si riscontra una risposta molto lenta
ai transitori, specialmente nel caso di variazioni a gradino
della corrente in presenza di carichi elevati.
Esistono inoltre topologie di controllo con un modulato-
re costante del tempo di attivazione, che mantiene una
frequenza pseudo-fissa senza compensazione esterna,
come la modalità di controllo D-CAP/D-CAP3 di TI. Il
tempo di attivazione (on-time) è fissato per determinati
valori di VIN e VOUT e la frequenza di commutazione
può variare durante il transitorio di carico, che assicura
ottime prestazioni in termini di risposta ai transitori. Tut-
tavia, questa variazione di frequenza comporta l’insorgere
di problematiche in termini di interferenza elettromagne-
tica (EMI), in particolare in applicazioni di telecomuni-
cazioni sensibili a questo fenomeno. La modalità ACM a
compensazione interna permette di superare gli inconve-
nienti legati sia al controllo a frequenza fissa sia al con-
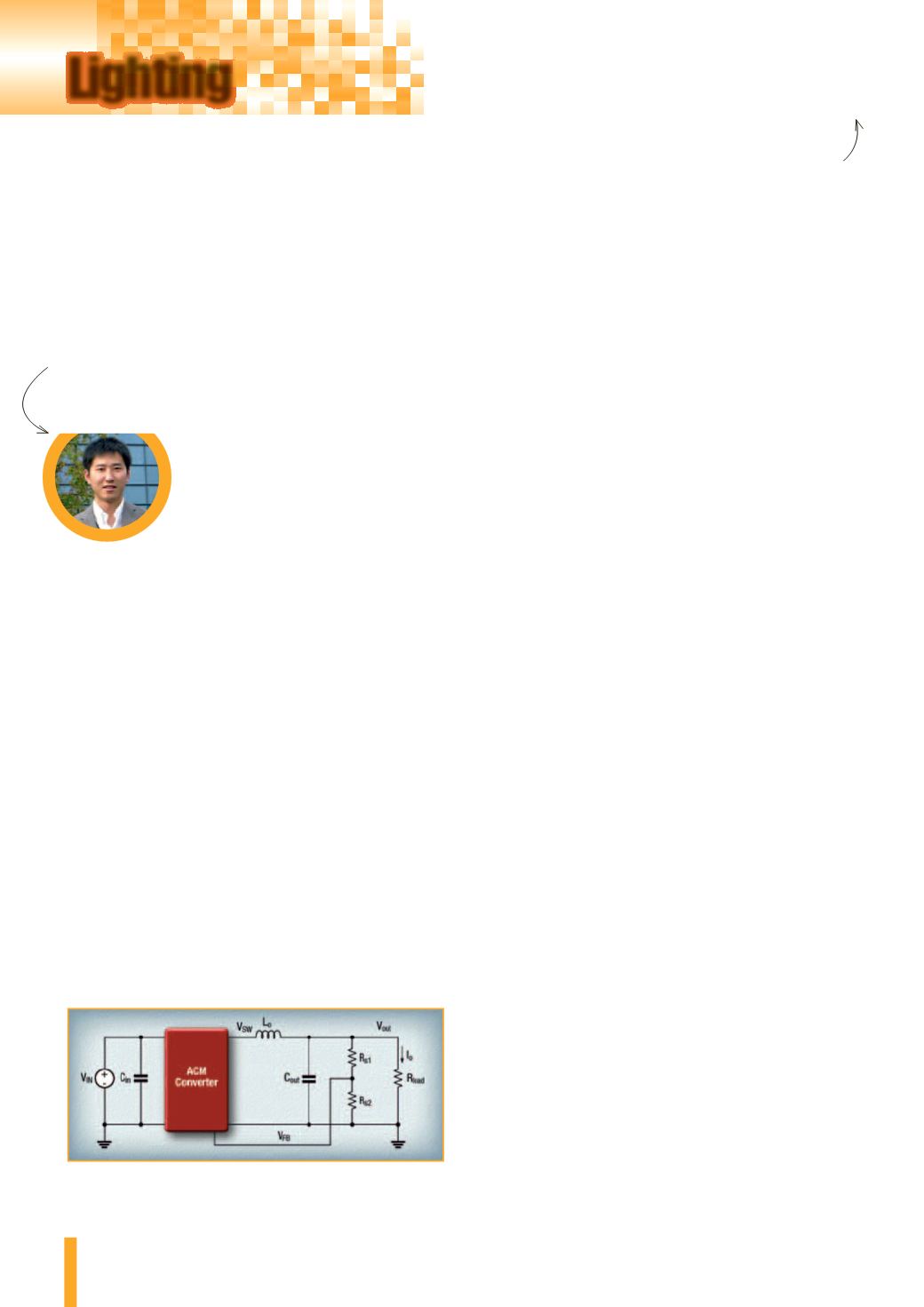
trollo con tempo di attivazione costante. La struttura buck
semplificata con ACM, mostrata nella figura 1, permette
di inviare le informazioni sulla tensione di feedback dallo
stadio di uscita all’integratore interno, senza ricorrere a
una rete di compensazione esterna.
La semplice struttura di controllo offre i seguenti vantaggi:
-
ce e chiaro. Sono necessari soltanto RS1 e RS2, come
divisori di resistenza, per rilevare VOUT senza la rete
di compensazione e le informazioni di VOUT rilevate
vengono inviate al circuito di controllo tramite VFB.
-
pensazione PID (proporzionale-integrale-derivata) o
PI (proporzionale-integrale), permette al progettista di
evitare il complicato progetto del circuito di compensa-
zione, con tutti i vantaggi che ciò comporta.
I vantaggi della topologia ACM
a compensazione interna
La modalità ACM garantisce una migliore risposta ai transitori rispetto alla tradizionale
modalità a picco di corrente, ottimizzando separatamente le porzioni sia in alternata sia in
continua dell’anello di tensione e di rampa
Texas Instruments
Fig. 1
– Sistema buck semplificato con ACM