

















 35 / 86
35 / 86

POWER
DC DC CONVERTER
35
- ELETTRONICA OGGI 459 - GENNAIO/FEBBRAIO 2017
gli altri, ma qui di seguito saranno analizzati pregi
e difetti dei tradizionali schemi di compensazione
analogico e digitale.
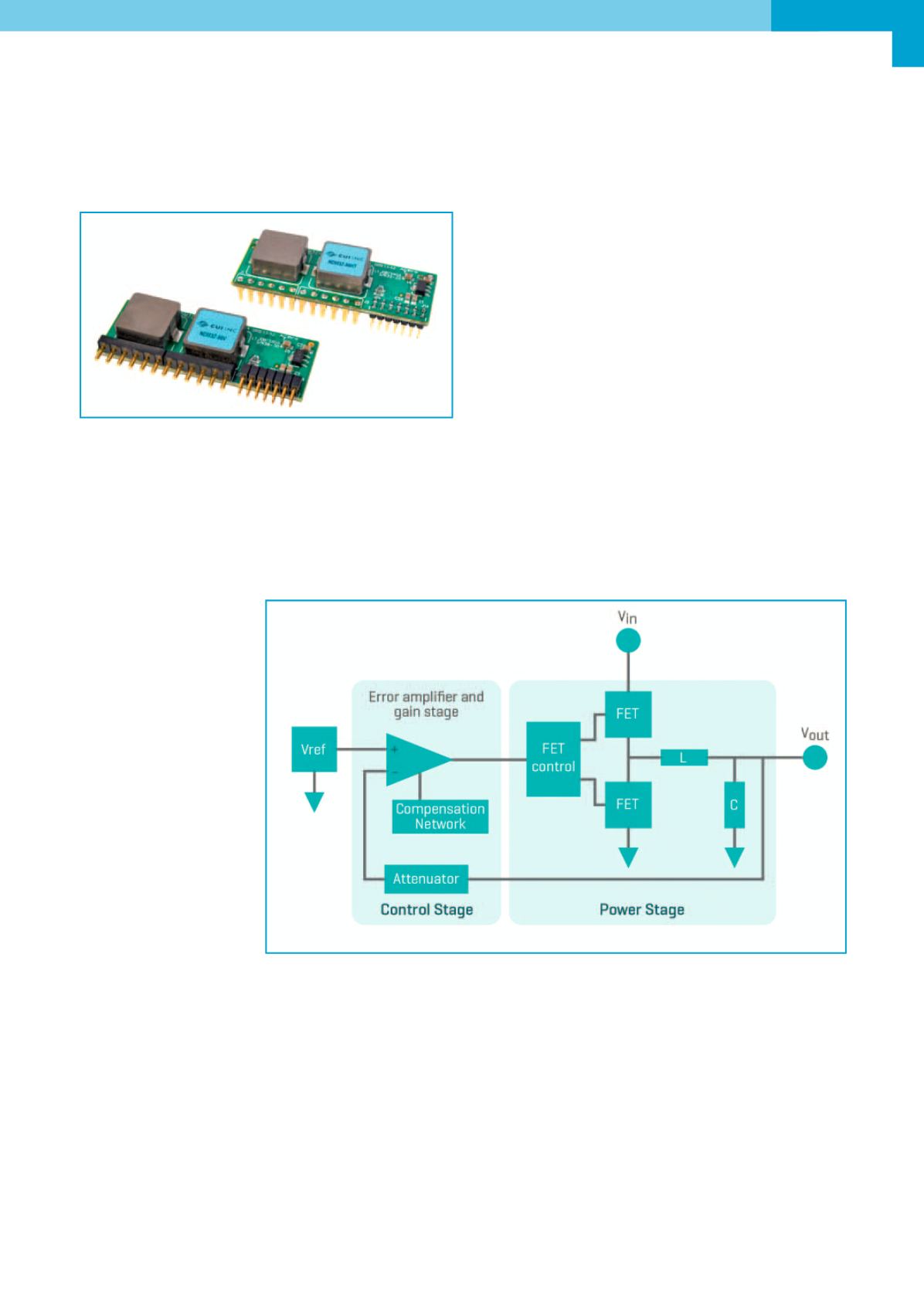
Compensazione analogica (Fig. 4):
in una rete di
compensazione analo-
gica l’uscita del modulo
è rilevata, filtrate e con-
frontata con una ten-
sione di riferimento per
generare un segnale di
errore. Questo segnale
è utilizzato per compen-
sare l’uscita e corregge-
re qualsiasi deviazione
che possa essersi veri-
ficata.
Il vantaggio degli sche-
mi di compensazione di
tipo analogico è dato dal
fatto che sono utilizzati
da molto tempo e posso-
no essere implementati
mediante componenti
standard. Lo svantag-
gio, invece, è legato alla
difficoltà di regolare in
modo adeguato l’anel-
lo, al fine di garantire la stabilità in tutte le condizioni
operative, mantenendo nel contempo un’ampiezza di
banda sufficiente estesa per consentire una risposta
rapida ai fenomeni transistori. Un’operazione di que-
sto tipo richiede parecchie ore trascorse in laborato-
rio per effettuare a più riprese operazioni di saldatura
di componenti, dissaldatura e collaudo. Gli schemi di
compensazione analogici, inoltre, sono sensibili al ru-
more esterno che può essere acquisito e accoppiato
inavvertitamente con l’uscita.
Sebbene lo schema di compensazione analogico (e
le sue differenti versioni) sia in auge da molto tempo,
nell’ultimo decennio sono stati messi a punto nuovi
schemi di compensazione digitali che garantiscono
indubbi vantaggi.
Compensazione digitale (Fig. 5):
analogamente agli
schemi di tipo analogico, una realizzazione che pre-
veda la compensazione digitale rileva l’uscita, la fil-
tra, la confronta con un riferimento, genera un errore
e alla fine effettua la compensazione dell’uscita per
correggere qualsiasi deviazione che possa essersi
verificata. La fondamentale differenza è data dal fatto
che questa sequenza di operazioni viene eseguita nel
dominio digitale. Il rilevamento dell’uscita è eseguita
mediante un convertitore A/D mentre il confronto, la
generazione dell’errore e la compensazione avven-
gono all’interno di un circuito integrato. L’esecuzione
all’interno del dominio digitale garantisce un notevo-
le miglioramento in termini di reiezione del rumore,
che permette di evitare l’accoppiamento indesiderato
con l’uscita di sorgenti di rumore esterne.
L’adozione di uno schema di compensazione digitale
evita di spendere parecchie ore al chiuso di un labo-
ratorio per saldare/dissaldare differenti componenti
al fine di modificare e ottimizzare l’anello di retroa-
zione. A tal fine, è sufficiente modificare alcuni para-
metri digitali all’interno dell’integrato per modificare
il comportamento del modulo PoL e soddisfare le ri-
Fig. 3 – La famiglia di moduli PoL digitali NDM3Z-90 di CUI
Fig. 4 – Schema di un tipico regolatore di tensione a commutazione analogico