
















 35 / 100
35 / 100

35
EMBEDDED
61 • SETTEMBRE • 2016
CONNECTIVITY |
IN TEMPO REALE
La prima versione è destinata ad applicazioni che
prevedono l’uso di sensori e supporta un massimo di
otto canali PNP – in modalità unidirezionale dal rice-
F
-
.// ' ` ( &%
À *
a supportare Industrial Ethernet che garantisce velo-
cità di trasferimento dati pari a a 100 Mbit/s.
&
À
ed è necessariamente dinamica, senza interazione
da parte dell’utente. La distanza è breve – un paio
di millimetri al massimo – in modo da non creare
problemi in termini di sicurezza e di emissioni RF.
Il connettore può supportare un massimo di otto
@B@
@
% À -
il collegamento dati si utilizza la ridondanza nel
C ;
%
-
po lontano è minima e il progetto dell’antenna è
simmetrico per consentire la rotazione (Fig. 3). Di-
sallineamento, rotazione e inclinazione non creano
problemi di nessun genere.
&% À
%
-
*
0.2
(potenza di uscita dal lato ricevitore/potenza in in-
( 6
dipende dal carico, dalla distanza e da altri fattori,
ma include anche le perdite attraverso il collega-
mento dati e gli assemblaggi sulla scheda PCB. In
À
-
gillati ermeticamente con grado di protezione IP67,
anche se non sono connessi gli uni con gli altri.
Largo ai robot
L’integrazione della modalità di trasferimento di
potenza e dati senza contatto si traduce in costi
– in termini di cicli di accoppiamento o condizioni
ambientali, di complessità dei cablaggi – che scon-
sigliano l’utilizzo dei connettori tradizionali.
*
robotizzati, sempre più utilizzati in processi ma-
nifatturieri e produttivi che richiedono maggiore
complessità e precisione. Considerate le condizioni
ambientali e il costo dei fermi macchina, a lungo
termine l’adozione di una metodologia di connetti-
- À
?
termini economici.
In una tipica applicazione di robotica, i cavi limi-
tano il raggio di movimento, mentre il movimento
costante e l’attrito delle parti meccaniche com-
portano l’insorgere di fenomeni di usura. I robot
devono anche poter eseguire totazioni per lo svol-
gimento di compiti complessi. Tradizionalmente,
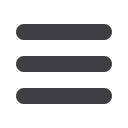
Fig. 3 – Implementato in un connettore di tipo
M30, il progetto di antenna ad anello near-field
per un collegamento dati basato sulla connettività
senza contatto è simmetrico per consentire la ro-
tazione
(Immagine: TE Connectivity)
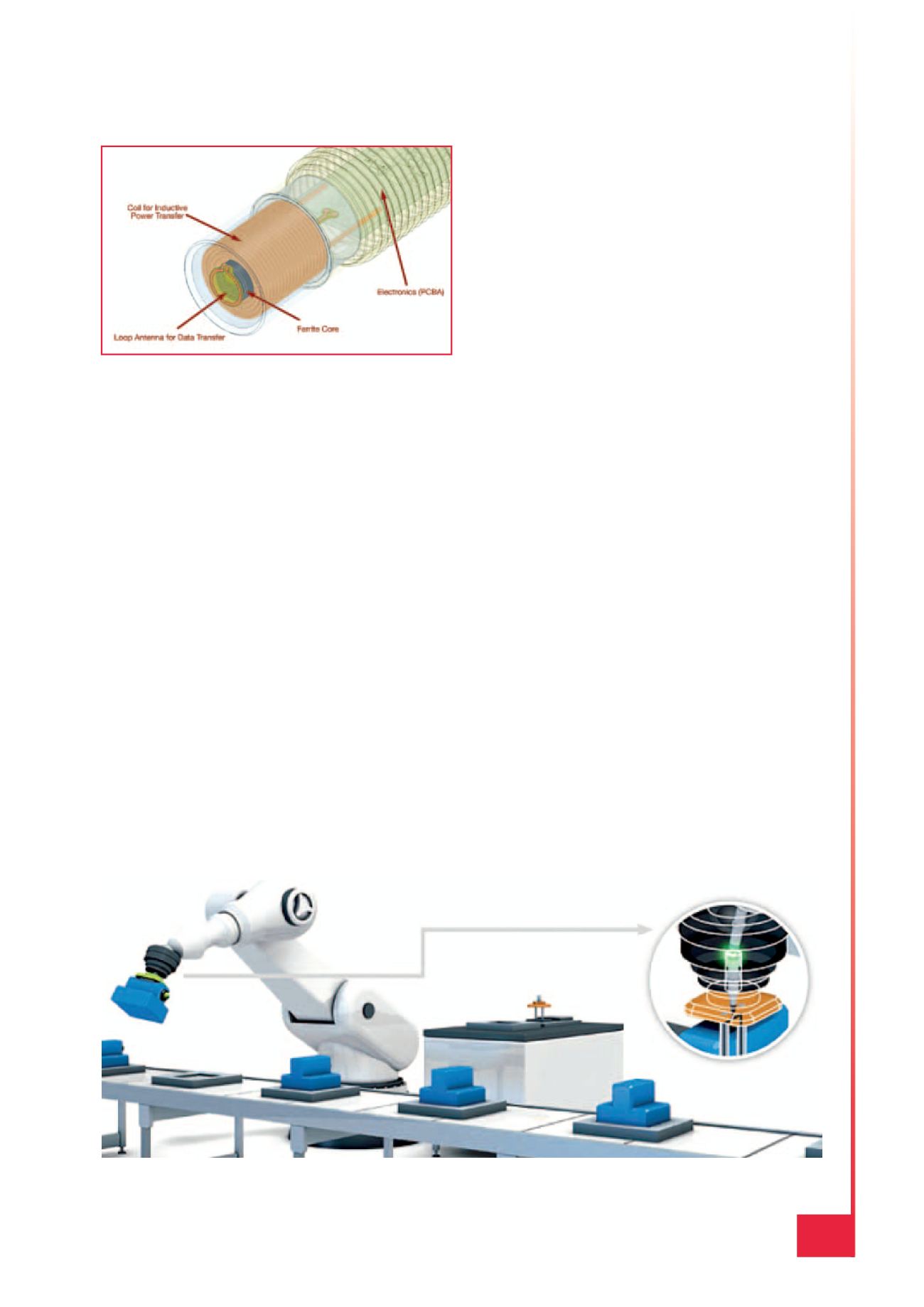
Fig. 4 – L’utilizzo della connettività senza contatto su un braccio robotizzato consente una libertà
di movimento di 360° senza provocare l’usura delle spazzole tipica dei progetti ad anello collettore
correnti
(Immagine: TE Connectivity)