Alimentazione: alcuni suggerimenti (parte 34) – Progettazione di un semplice alimentatore ausiliario isolato
-

- Tweet
- Pin It
- Condividi per email
-
Avete mai sentito il bisogno di generare un’alimentazione isolata per il comando di gate, per il rilevamento isolato o per i circuiti di comunicazione? In questo Power Tip daremo un’occhiata a un circuito in grado di fare ciò con un numero di componenti, complessità e costo minimi. Questo circuito èutilizzato quando si ha a disposizione una tensione di ingresso ridotta e i circuiti alimentati permettono qualche variazione della tensione di alimentazione (5%).

Fig. 1 – Un buck sincrono fornisce un’alimentazione isolata
La figura 1 mostra un esempio di questa tecnica: un circuito integrato (IC) sviluppato appositamente per questo requisito. In ogni caso, qualsiasi circuito buck sincrono in grado di lavorare in “sink operation” (cioè la corrente nell’induttore deve poter andare anche in verso opposto) può essere utilizzato. Questo circuito, noto come flyback (o flybuck) a semiponte asimmetrico, funziona come un regolatore buck sincrono. Un totem pole a FET, connesso alla tensione di ingresso, alimenta un filtro condensatore-induttore. L’uscita del filtro viene poi regolata attraverso il divisore di tensione e l’ingresso invertente di un amplificatore d’errore. L’amplificatore d’errore controlla il duty cycle del FET per mantenere la tensione DC al giusto valore.
La tensione su C6 è circa pari alla tensione di ingresso moltiplicata per il duty cycle. Come per uno stadio di potenza buck, il valore medio, in un ciclo, dell’area tensione-tempo sull’induttore deve essere pari a zero. Questo circuito aggiunge un avvolgimento accoppiato all’induttore e utilizza il diodo per raddrizzare la tensione dell’induttore riflesso quando il FET low side è in funzione. La tensione sull’induttore durante questo processo è pari alla tensione di uscita e idealmente l’uscita del circuito sarà regolata. Pertanto, le cadute di tensione nel circuiti primario e secondario avranno un impatto negativo sulla regolazione. In questo circuito, la regolazione della tensione in funzione del carico subirà un impatto significativo dovuto alla tensione di forward del diodo D1. Tuttavia, il diodo può essere sostituito con un FET per migliorare la regolazione del carico.
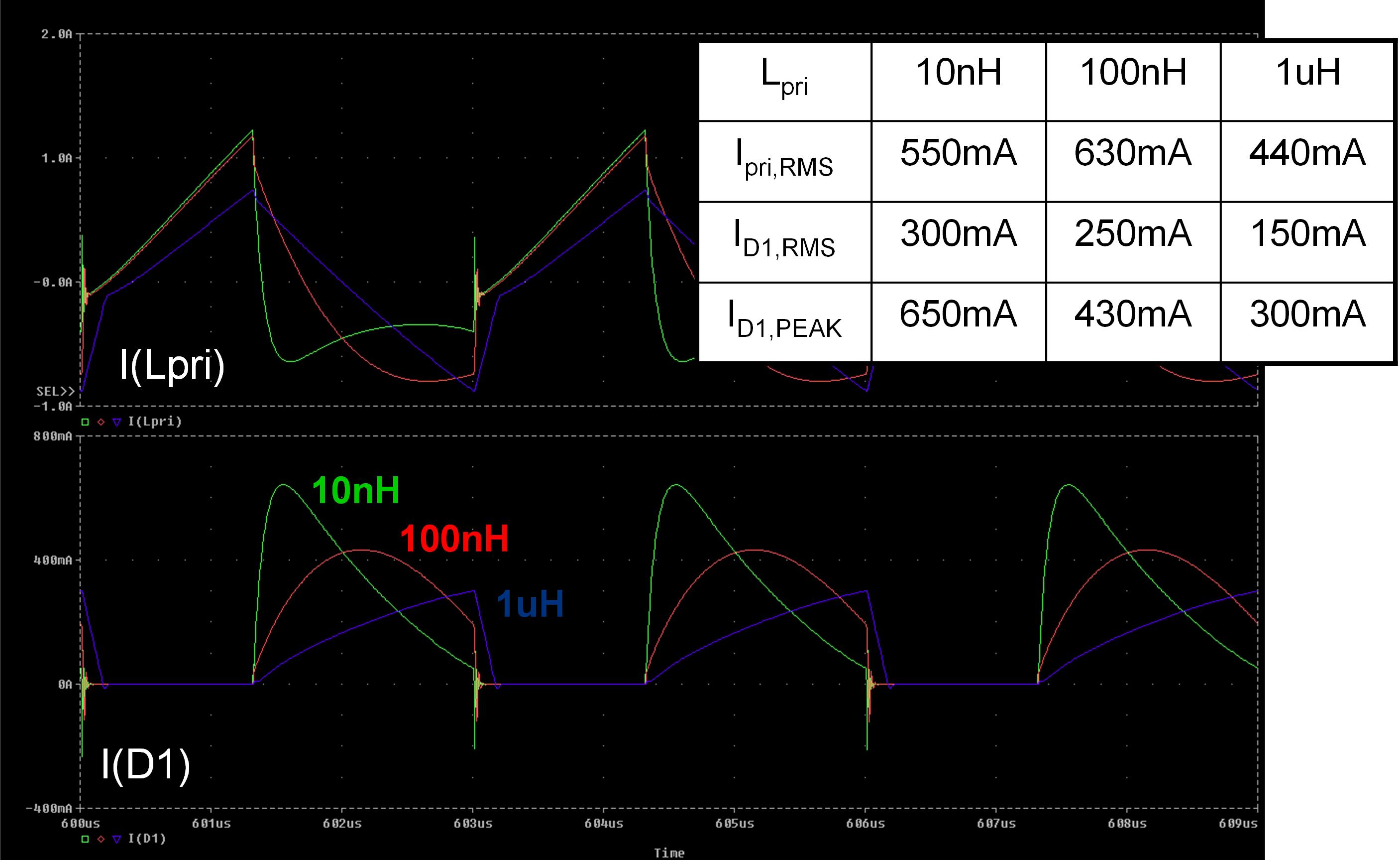
Fig. 2 – Una perdita ridotta aumenta le correnti di circolazione
Così come con un SEPIC con induttore accoppiato, i componenti parassiti in questa topologia possono avere un impatto sulle prestazioni del circuito. Durante il tempo di ON, il circuito è abbastanza “tranquillo” e la maggior parte della corrente fluisce nell’induttanza magnetizzante dell’induttore accoppiato, T1, caricando C6. Il condensatore di uscita, C3, fornisce la corrente di carico. Tuttavia, durante il tempo di OFF, i due condensatori vengono connessi in parallelo tramite gli avvolgimenti accoppiati dell’induttore. Questi condensatori presentano diverse tensioni e gli unici fattori che limitano il flusso di corrente tra i due sono i componenti parassiti nel circuito. Questi parassiti includono l’ESR dei due condensatori, la resistenza di avvolgimento dell’induttore accoppiato, le resistenze dei MOSFET low-side (e relativo diodo) e l’induttanza dispersa degli induttori accoppiati.
La figura 2 mostra le correnti simulate per diversi valori di induttanza dispersa. Il set superiore rappresenta la corrente nel primario di T1 e il set della parte inferiore rappresenta la corrente nel diodo di uscita, D1. L’induttanza dispersa varia da un induttore completamente accoppiato di 10 nH a un induttore debolmente accoppiato di 1 uH. Nel caso dell’induttore completamente accoppiato, la corrente di picco è di gran lunga maggiore ed è essenzialmente limitata dalle resistenze in tutto il circuito.
Nel caso dell’induttore debolmente accoppiato, le correnti di picco sono più ridotte. L’elevata induttanza dispersa consente di migliorare l’efficienza dell’alimentazione riducendo le correnti RMS. Nella figura 2 viene mostrato il confronto. Un induttore debolmente accoppiato presenta una riduzione del 50% nel flusso di corrente, portando ad una riduzione delle perdite di un 75% in alcuni componenti. Lo svantaggio nell’utilizzare un induttore debolmente accoppiato viene rappresentato da un degrado nella regolazione della tensione di uscita.
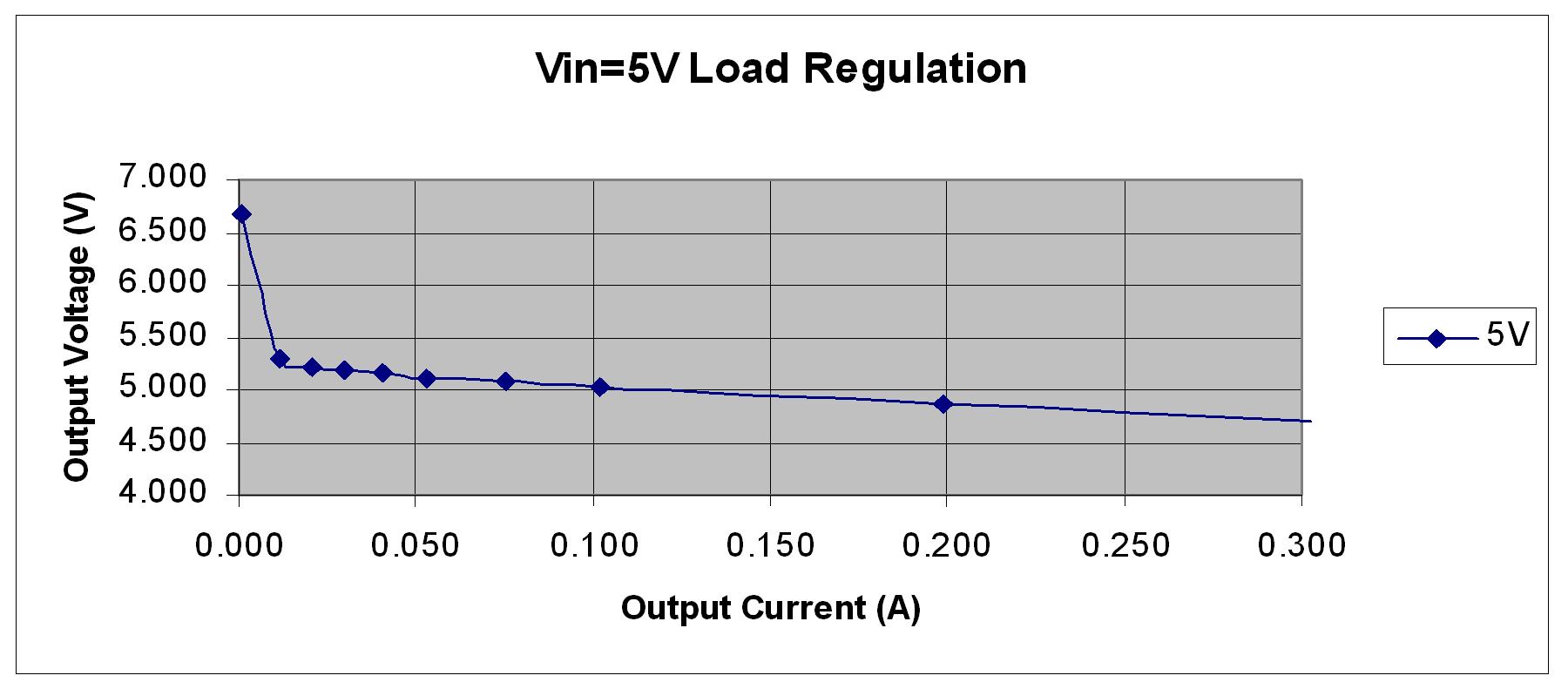
Fig. 3 – La regolazione del carico in un flybuck è abbastanza buona in molti casi
La figura 3 mostra i risultati della regolazione del carico per un convertitore come nella figura 1. Se la variazione della corrente di carico è limitata, questo convertitore fornisce una regolazione “abbastanza buona” in molti casi. L’impatto della variazione della tensione di giunzione del diodo, cosi’ come il ringing, risulta elevato a bassi carichi. Un carico minimo, o uno Zener, potrebbe essere necessario per ridurre questi effetti a carico ridotto. A pieno carico, i componenti parassiti del circuito compromettono la regolazione. Di conseguenza, riducendoli i risultati migliorano. Ad esempio, la sostituzione di un diodo con un interruttore sincrono migliora notevolmente la regolazione del carico. Riassumendo, un convertitore flybuck fornisce una topologia interessante che risponde alla necessità di un’alimentazione a basso costo, semplice ed isolata se il carico è in grado di tollerare una certa variazione (dal 5% al 10%) sulla tensione di uscita. L’efficienza, con uscita a 5 volt, può essere buona (80%) con i raddrizzatori a diodi e può essere ulteriormente migliorata con dei raddrizzatori sincroni.
Nel prossimo articolo vedremo come minimizzare l’effetto della capacità distribuita in un trasformatore.
Per ulteriori informazioni su questa e altre soluzioni per gli alimentatori, visitare: http://www.ti.com/power-ca
Per contattare Robert Kollman: [email protected]
Riferimento
- Chen&Chen; “Small-Signal Modeling of Assymetrical Half-Bridge Flyback Converter” (Modelli di piccoli segnali di convertitori flyback a semiponte) IPEMC 2006.
Robert Kollman, Texas Instruments
Contenuti correlati
-
 Power Integrations presenta nuovi IC flyback
Power Integrations presenta nuovi IC flybackPower Integrations ha annunciato la nuova famiglia di circuiti integrati flyback TopswitchGaN che combina la tecnologia PowiGaN e l’architettura dei circuiti integrati Topswitch. Si tratta di una innovazione che permette di estendere la potenza dei convertitori flyback fino...
-
 TI: nuovi moduli di alimentazione
TI: nuovi moduli di alimentazioneI nuovi moduli di alimentazione isolati UCC34141-Q1 e UCC33420 di Texas Instruments (TI) si basano sulla tecnologia IsoShield dell’azienda, una soluzione proprietaria sviluppata per package multichip. Questi nuovi componenti -sottolinea il produttore- offrono una potenza maggiore in spazi...
-
 TI e Nvidia per le architetture di alimentazione a 800 V
TI e Nvidia per le architetture di alimentazione a 800 VTexas Instruments (TI) e Nvidia hanno annunciato un’architettura di alimentazione a 800 V progettata per supportare la visione di Nvidia per i data center AI. Il produttore sottolinea che la sua architettura di alimentazione a 800 VCC...
-
 Due nuove famiglie di MCU con NPU da TI
Due nuove famiglie di MCU con NPU da TILe MCU MSPM0G5187 e AM13Ex sono due nuove famiglie di microcontroller di Texas Instruments (TI). Questi dispositivi integrano le unità di elaborazione neurale (NPU) TinyEngine di TI, un acceleratore hardware dedicato per MCU in grado di ottimizzare...
-
 TI: il futuro dell’IA a embedded world 2026
TI: il futuro dell’IA a embedded world 2026All’edizione 2026 di embedded world, Texas Instruments (TI) sarà presente con i suoi prodotti per l’elaborazione analogica ed embedded, software e un ecosistema di strumenti di sviluppo. In particolare, saranno presenti le innovazioni in ambito IA e...
-
 Le nuove tecnologie per l’automotive di Texas Instruments
Le nuove tecnologie per l’automotive di Texas InstrumentsTexas Instruments (TI) ha annunciato diversi nuovi prodotti e risorse per lo sviluppo destinati al settore automotive. Si tratta della famiglia di SoC scalabili TDA5, componenti per il calcolo ad alte prestazioni caratterizzati da funzionalità di elaborazione ottimizzate...
-
 TI: un nuovo DMD per la litografia
TI: un nuovo DMD per la litografiaTexas Instruments (TI) ha introdotto DLP991UUV, un DMD (Digital Micromirror Device) utilizzabile per la litografia digitale maskless. Questa soluzione per l’imaging ha 8,9 milioni di pixel (il mirror pitch è di 5,4 μm), una velocità di elaborazione...
-
 Nuove MCU C2000 low cost da TI
Nuove MCU C2000 low cost da TITexas Instruments (TI) ha presentato la serie F28E12x, microcontroller real time C2000 low-cost basati su un core DSP C28x a 160 MHz e dotati di periferiche analogiche come un convertitore analogico/digitale ad alta velocità e un amplificatore di...
-
 TI presenta uno switch che riduce i costi
TI presenta uno switch che riduce i costiTexas Instruments (TI) ha realizzato TMAG5134, uno switch in-plane a effetto Hall che consente il rilevamento della posizione e offre un’alternativa conveniente e di semplice utilizzo rispetto ai sensori magnetoresistivi. Si tratta di uno switch digitale che...
-
 Due misuratori di carica per batterie da TI
Due misuratori di carica per batterie da TIBQ41Z90 e BQ41Z50 sono due nuovi misuratori single-chip di TI per il livello di carica delle batterie. Peculiarità di questi componenti è l’utilizzo della tecnologia adattiva Dynamic Z-Track che consente di ottenere una maggiore efficienza e affidabilità...
Scopri le novità scelte per te
-
Power Integrations presenta nuovi IC flyback
Power Integrations ha annunciato la nuova famiglia di circuiti integrati flyback TopswitchGaN che combina la tecnologia PowiGaN...
-
TI: nuovi moduli di alimentazione
I nuovi moduli di alimentazione isolati UCC34141-Q1 e UCC33420 di Texas Instruments (TI) si basano sulla tecnologia...

News/Analysis Tutti ▶
-
 Cosmic Semiconductor Solutions a Pcim Europe 2026
Cosmic Semiconductor Solutions a Pcim Europe 2026Cosmic parteciperà per la prima volta a Pcim Europe 2026, evento che si terrà a...
-
 29 premi per DigiKey
29 premi per DigiKeyIn occasione dell’EDS Leadership Summit 2026, evento tenutosi dal 18 al 22 maggio a...
-
 Le previsioni di Wsts sui semiconduttori per il 2026
Le previsioni di Wsts sui semiconduttori per il 2026L’organizzazione World Semiconductor Trade Statistics (Wsts) ha rivisto sensibilmente al rialzo le sue previsioni...
Products Tutti ▶
-
 Soluzione di conformità ASA-ML da Rohde & Schwarz
Soluzione di conformità ASA-ML da Rohde & SchwarzRohde & Schwarz ha presentato una nuova soluzione di conformità ASA Motion Link per...
-
 Emerson amplia la gamma NI PXI
Emerson amplia la gamma NI PXILe più recenti aggiunte al portafoglio VST (Vector Signal Transceiver) NI PXI di Emerson...
-
 Microchip presenta una serie di DSC essenziali
Microchip presenta una serie di DSC essenzialiMicrochip Technology ha introdotto una nuova famiglia di Digital Signal Controller (DSC) che permette...

