

















 35 / 86
35 / 86

DIGITAL
AUTOMOTIVE
35
- ELETTRONICA OGGI 468 - MARZO 2018
borazione. Il controller di memoria DDR può accedere
fino a 2GB di memoria e garantire un elevato rendi-
mento e prestazioni grafiche ottimali. L’array shader
unificato supporta gli shader (set di istruzioni) vertex
shader e fragment shader, che abilitano la grafica e le
funzioni compatibili con OpenGL ES 2.0, come il dise-
gno di oggetti grafici con antialiasing. L’array supporta
profondità di colore a 16 e a 32 bit, una memoria di
immagini con 32 bit per pixel e texture degli spazi di
colore RGBA, ARGB e
ABGR. La funzione di
“miglioramento della
visibilità”
confron-
ta pixel contigui per
produrre
immagini
ricche di colore natu-
rale e dettagli. L’unità
di firma della grafica
flessibile fornisce agli
sviluppatori di sistemi
del settore automobi-
listico un metodo po-
tente ed efficiente di
controllo dell’integrità
dei dati da gestire.
MB86R24 supporta
una memoria a 64-bit
(DDR2-800 o DDR3-
1066) fino a 2GB. L’ar-
chitettura modulare
unificata consente il
semplice accesso alla
memoria ai core del
processore e all’engi-
ne grafico. L’alimentazione flessibile del modulo SoC
consente l’attivazione e la disattivazione selettiva dei
core se le circostanze impongono il controllo del con-
sumo energetico. Il SoC dispone di numerose modalità
di standby a basso consumo energetico e una funzione
di aggiornamento automatico della memoria esterna.
Una soluzione completa
La complessità e il grado di sofisticazione del control-
ler di visualizzazione grafica e del sistema 360° Wrap-
Around View sono molto elevati. Di conseguenza, sono
necessari alcuni strumenti per la progettazione e la
verifica dell’applicazione visiva prima dell’installazione
nel veicolo. Per questo motivo, Socionext offre vari stru-
menti di design che agevolano lo sviluppo del sistema e,
in particolare, la creazione delle prospettive desiderate
del prodotto finale. Utilizzando gli strumenti di design,
è possibile procedere alla regolazione di parametri,
angolazione della telecamera o luminosità della luce
diurna per aumentare la precisione del processo di ca-
librazione. La prima operazione (Fig. 4) è incentrata sui
dati immessi dell’utente, come ad esempio i parametri
di distorsione delle lenti della telecamera, la realizza-
zione di immagini fisse con le telecamere e un modello
3D del veicolo target.
Il Converter Tool S3D
serve a convertire
prima il modello 3D
in un formato di im-
missione appropriato.
I dati provengono da
un file creato con uno
strumento di proget-
tazione Autodesk, 3ds
Max o simile. Conse-
guentemente, i dati del
modello del veicolo
vengono regolati me-
diante il tool Material
Editor. Ciò significa
che è possibile modi-
ficare i colori, la posi-
zione della sorgente
luminosa o la rotazio-
ne dell’asse. Inoltre, è
possibile memorizzare
varie combinazioni di
materiali in file csv. È
inoltre possibile modi-
ficare facilmente le combinazioni di materiali in base ai
requisiti del cliente. I set di dati prodotti con gli stru-
menti fanno parte dell’applicazione visiva finale.
Per le impostazioni delle telecamere, queste ultime sono
montate inizialmente nei punti del veicolo appropriati
(anteriore, posteriore, sinistra, destra). I triangoli dei
contrassegni sono fissati a distanze predefinite. Vengo-
no quindi effettuate le registrazioni, che servono come
input dello strumento di creazione dei dati di sistema
System Data Creator. Questo strumento rappresenta l’e-
lemento centrale del processo di calibrazione ed è parte
essenziale dell’intero flusso di lavoro del progetto. Oltre
alle registrazioni, è necessario acquisire ulteriori dati
importanti in merito ai parametri di distorsione, texture,
misura e posizione dei contrassegni e delle aree di clip-
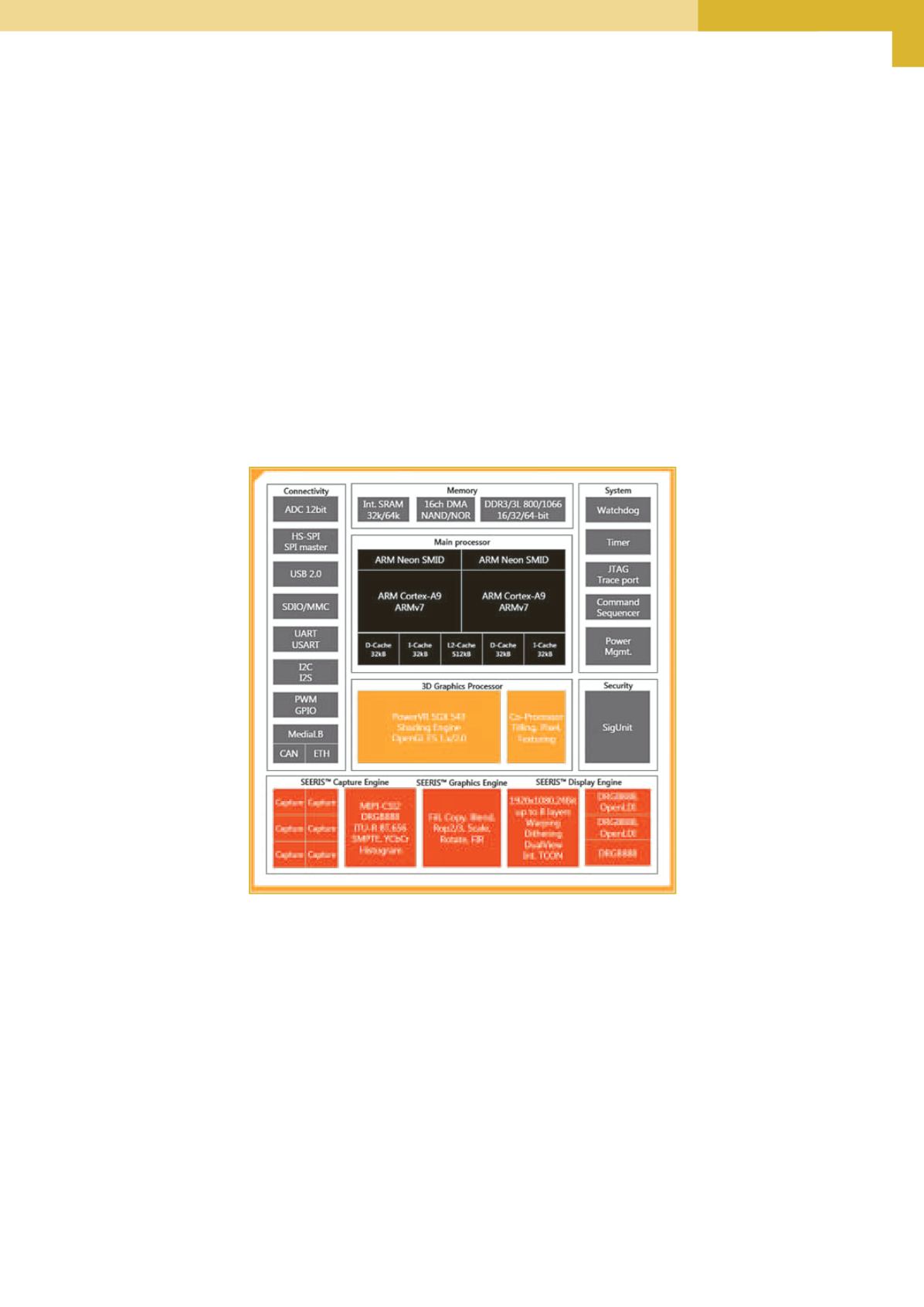
Fig. 3 – Schema a blocchi del controller di visualizzazione grafica MB86R24