

















 23 / 102
23 / 102

TECH INSIGHT
NEWS/ TECHNOLOGIES
23
- ELETTRONICA OGGI 466 - NOVEMBRE/DICEMBRE 2017
Il soft robot sulla rampa di lancio
Francesco Ferrari
S
e si pensa a un robot, quasi certamente vengono in mente degli
esempi legati al modello umano, in grado cioè di funzionare ri-
producendo i movimenti del corpo o di sue parti. Spesso però l’antro-
pomorfismo è una pesante limitazione (si pensi alla scarsa efficienza
del bipedismo o alle difficoltà tecniche nel riprodurre le giunture) e
per alcuni tipi di compiti, come la ricerca di qualcosa in spazi molto
ristretti e irregolari, ci sono alternative migliori.
La Soft Robotics è una soluzione particolarmente interessante per
la realizzazione di robot in grado di adattarsi meglio ad applicazioni
specifiche, come per esempio la ricerca di persone fra le macerie.
I soft robot, infatti, utilizzano materiali morbidi e flessibili, ma sono
anche sostanzialmente diversi nelle modalità operative rispetto ai
robot tradizionali, visto che si ispirano alla natura per la loro intera-
zione con l’ambiente che li circonda. I soft robot si possono allungare, deformare, adattare all’ambiente, come
accade in alcune specie animali e vegetali, come per esempio le piante come l’edera o la vite oppure le cellule
nervose. Infatti, questi particolari robot si possono muovere e crescere sviluppando una struttura libera. Tra le
più recenti novità su questo tema ci sono i risultati ottenuti dai ricercatori delle
Università di Stanford
e della
California, che hanno ideato un robot che ricorda un tentacolo, riportando la ricerca in un articolo pubblicato
sulla rivista Science Robotics intitolato “A soft robot that navigates its environment through growth”. Alla base
dell’approccio usato per la progettazione, c’è l’idea di spostare la mobilità fuori dal meccanismo, e infatti, questo
robot si muove in modo molto diverso da come fanno uomini e ani-
mali. Per capire che cosa effettivamente potesse fare questo nuovo
tipo di macchina i ricercatori hanno realizzato un prototipo in gra-
do di muoversi superando diversi tipi di ostacoli, di raggiungere
un punto prestabilito e di crescere in una struttura libera. Questo
robot infatti può coprire le distanze crescendo. In pratica, il robot è
realizzato con un tubo di materiale morbido ripiegato internamen-
te come accade per i calzini piegati. Il tubo cresce in una direzione
quando il materiale nella parte anteriore si avvicina. In sostanza, il
corpo si allunga mentre il materiale si estende dall’estremità, ma il
resto del corpo non si muove. Il corpo può quindi essere bloccato
all’ambiente circostante ma la punta può continuare ad avanzare.
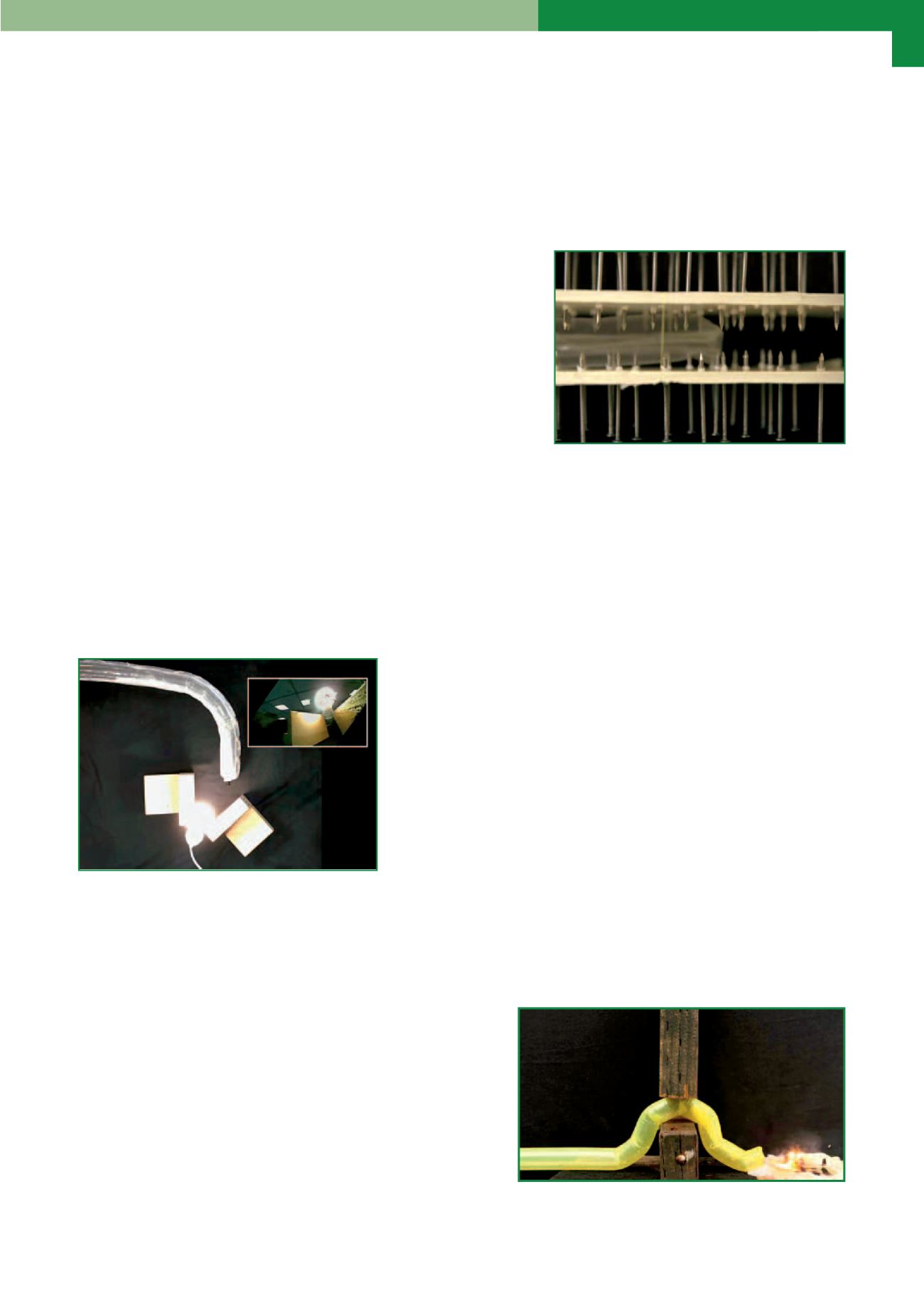
Il robot ha superato prove complesse, viaggiando su un percorso
con ostacoli come per esempio ghiaccio, colla e chiodi. Altri tipi di
test hanno visto il sollevamento di carichi di 100 kg e il passaggio
in spazi particolarmente ristretti, anche di solo il 10% del diametro normale. Per alcuni prototipi di questo tipo di
robot è stata utilizzata della plastica morbida e aria compressa, mentre per altre versioni l’aria è stata sostituita
da un fluido. Dal punto di vista delle possibilità di applicazione, questo robot può essere utilizzato per la ricer-
ca e il soccorso oppure per dispositivi medicali. All’interno
si può, per esempio, far scorrere un filo, permettendo il pas-
saggio di cavi in spazi stretti. Sulla punta, invece, si possono
collocare diversi tipi di sensori, comprese telecamere. I ricer-
catori, in particolare, si stanno focalizzando su applicazioni in
cui il robot deve muoversi in ambienti difficili, con caratte-
ristiche imprevedibili e spazi sconosciuti. Alcune versioni di
questi robot comprendono un sistema di controllo che gonfia
in modo differenziato il corpo, permettendo al robot di girare a
destra oppure a sinistra. I ricercatori hanno sviluppato inoltre
un sistema software che decide la direzione da prendere in
base alle immagini provenienti da una fotocamera posta sulla
I soft robot possono muoversi in spazi particolarmente
difficili da raggiungere
Sulla punta del soft robot si possono installare sensori o
anche una telecamera
Fonte: Stanford University
Fonte: Stanford University
Fonte: Stanford University
Il tipo di movimenti che possono fare i soft robot sono simili a
quelli di alcuni animali e piante rampicanti