
















 33 / 86
33 / 86

ANALOG/MIXED SIGNAL
ELECTRIC VEHICLE
33
- ELETTRONICA OGGI 460 - MARZO 2017
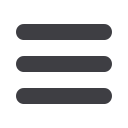
aggiungendo un altro controllo proporzionale ampia-
mente utilizzato, noto come controllo di tipo proporzio-
nale/integrale (PI).
Una tipica implementazione del controllo PI è riporta-
ta in figura 3.
[5]
Esso consente di approssimare a zero
l’errore nello stato stazionario e garantisce una miglio-
re risposta ai transitori. Grazie all’azione di controllo di
tipo proporzionale, essa non causa alcun offset e assi-
cura una riposta più rapida rispetto a quella ottenibili
con il solo controllo integrale.
Veicolo elettrico: un esempio applicativo
Il controllo del motore è parte integrante di un veico-
lo elettrico. La possibilità di ricavare informazioni cir-
ca la posizione del motore in modo preciso e veloce
è di fondamentale importanza. Il resolver collegato a
un albero motore tende a variare molto rapidamente
la propria uscita. Pertanto, l’architettura RDC deve es-
sere progettata in modo tale da poter rilevare questo
cambiamento. Tipicamente, il componente più critico
dell’architettura RDC che determina la velocità a cui
può avvenire questo processo è il circuito di rileva-
mento digitale.
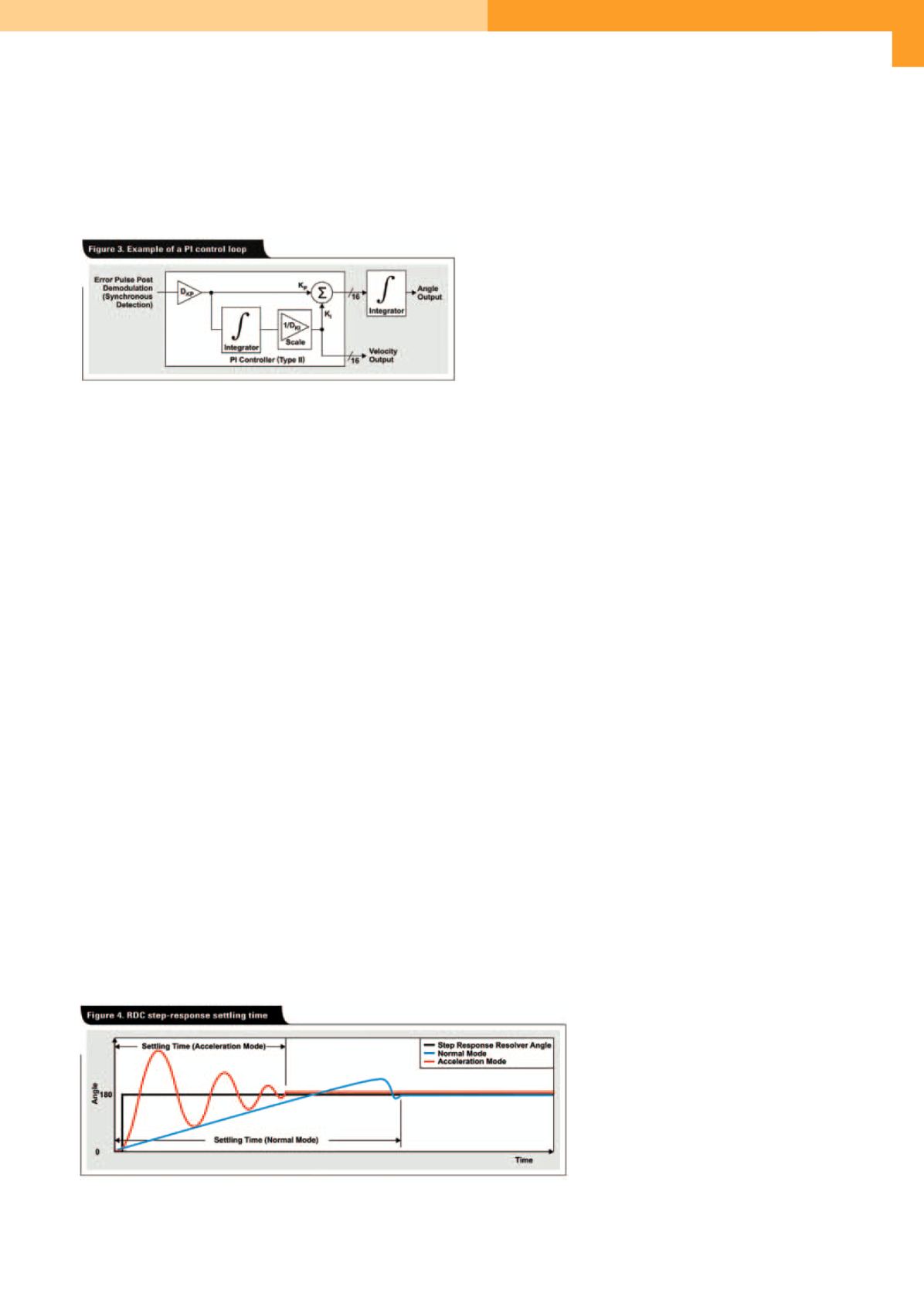
Per determinare il comportamento del circuito di tra-
cking, è importante comprendere un concetto fonda-
mentale, il tempo di assestamento (settling time). Quan-
do il segnale di uscita del resolver cambia rapidamente,
la risposta al gradino del convertitore è determinata dal
margine di fase e dal margine di guadagno dell’anello
di controllo.[3] Il tempo di assestamento è un indicatore
di prestazioni dell’anello di controllo dell’RDC. La figura
4 mostra un esempio relativo al tempo di assestamen-
to di un sistema di controllo della retroazione dell’RDC,
con la variazione a gradino dell’ingresso evidenziato in
nero. Il segnale blu è relativo alla risposta in modalità
normale per il circuito in figura 3, mentre il segnale in
rosso si riferisce alla risposta durante la modalità di ac-
celerazione descritto in seguito.
Per seguire l’angolo di rotazione in condizioni in rapi-
do cambiamento, viene aggiunto un altro blocco di ac-
celerazione a circuito nella figura 5, che può cambia-
re il guadagno di retroazione del circuito di controllo.
L’opzione che prevede un valore maggiore del guada-
gno permette al circuito di controllo di seguire più fa-
cilmente un angolo in rapida rotazione. Nella modalità
di accelerazione (segnale rosso in Fig. 4), il guadagno
proporzionale è incrementato in maniera considerevole
rispetto alla modalità normale. Numerose funzionalità
diagnostiche permettono di avvertire il sistema della
presenza di eventuali problemi legati all’’integrità del
segnale dell’eccitatore e delle bobine di seno/coseno.
Sorgenti di errore che incidono sull’accuratezza del
sistema
Gli errori possono essere catalogati nei tre gruppi di
seguito descritti.
Posizionamento del resolver
∑
Struttura meccanica del sensore: l’errore statico è
generato da variazioni in fase di fabbricazione.
∑
Sbilanciamento della bobina: le tensioni di output
delle bobine potrebbero essere sbilanciate e causa-
re un errore.
∑
Disallineamento del resolver: il resolver potrebbe es-
sere stato montato in maniera errata e causare un
errore statico nel sistema.
Architettura dell’RDC
L’architettura dell’RDC può causare
errori statici e dinamici nel sistema.
Il ritardo dall’ingresso del segnale
del resolver all’output dei dati relativi
all’angolo può anch’esso causare er-
rori nel sistema. Ad esempio, il filtro di
ingresso è utilizzato per disaccoppiare
il rumore dal sistema. Il ritardo causa-
to dal circuito del filtro o la costante
temporale del filtro potrebbero causa-
Fig. 3 – Esempio di un circuito di controllo PI
Fig. 4 – Tempo di assestamento per risposta al gradino dell’RDC