
















 32 / 86
32 / 86

ANALOG/MIXED SIGNAL
ELECTRIC VEHICLE
32
- ELETTRONICA OGGI 460 - MARZO 2017
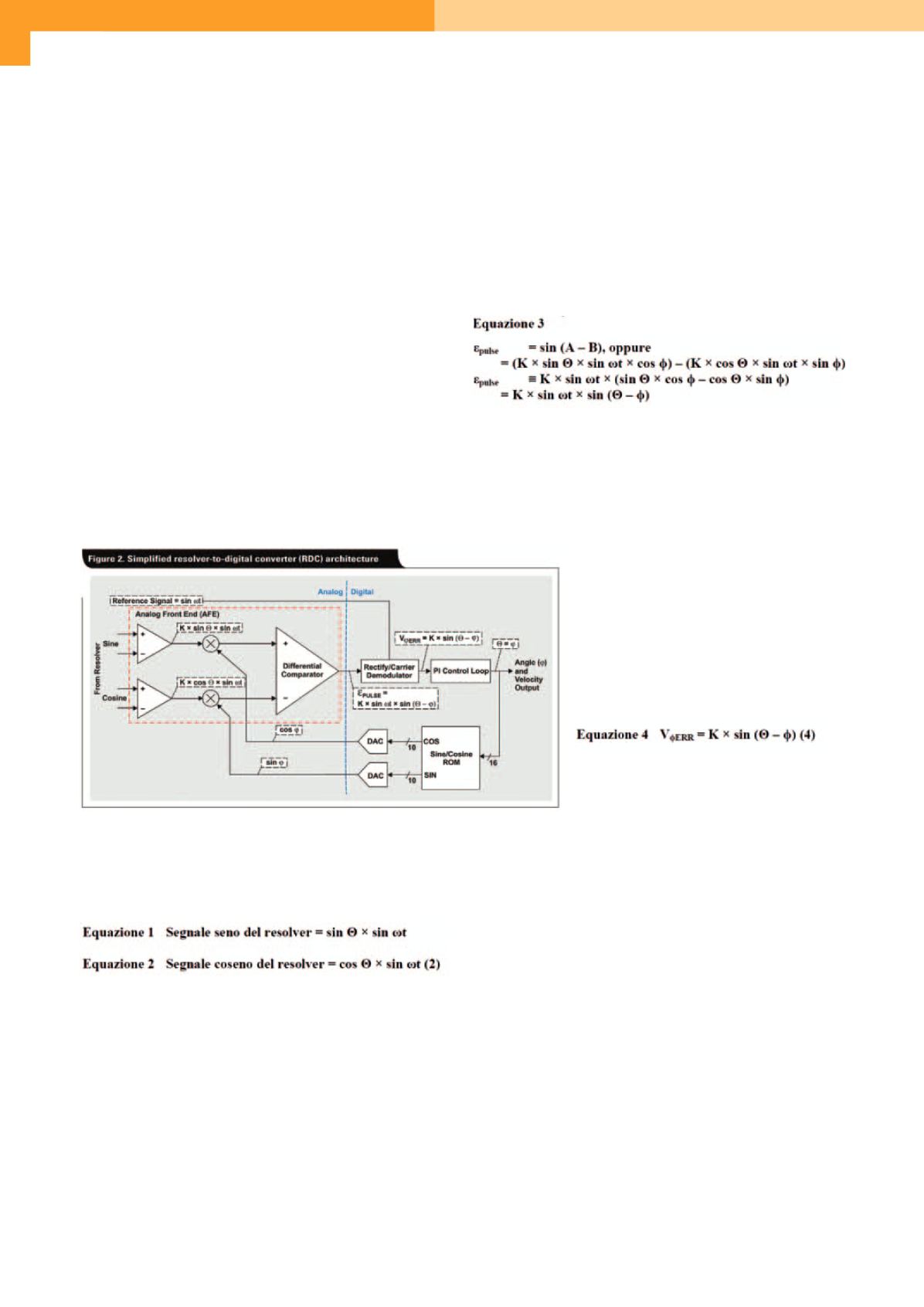
resolver in uscite digitali relativi ad angolo e velocità.
Il front-end analogico (AFE) è formato da amplificato-
ri a guadagno programmabile e da un comparatore. Il
blocco AFE esegue il condizionamento dei segnali di
uscita del resolver eliminando il rumore, impostando
la corretta polarizzazione in DC dell’ingresso e fornen-
do un valore adeguato del guadagno al segnale AC per
consentirne l’utilizzo da parte dei blocchi successivi.
L’elemento fondamentale della conversione RDC è un
anello di retroazione digitale. Si inizia ipotizzando un
angolo digitale, phi. Questo angolo viene elaborato
digitalmente utilizzando le tabelle di ricerca (look-up
table) relative a seno e coseno presenti in memoria. Il
risultato viene a sua volta trasferito ai corrispondenti
convertitori DAC per le componenti seno e coseno. Le
uscite dei DAC vengono moltiplicati per i segnali del
resolver modulati in ampiezza (equazioni 1 e 2), che
sono gli ingressi delle componenti seno e coseno del-
l’RDC.
dove = angolo dell’albero del resolver e = frequen-
za di eccitazione applicata a R1-R2.
L’obiettivo principale dell’architettura RDC è calcolare
l’angolo di rotazione ( ) e la velocità dell’albero del
resolver. Come mostrato in figura 1, l’informazione re-
lativa alla posizione angolare viene ricavata dall’invi-
luppo (picchi di tensione) dei segnali di ingresso seno
e coseno. Per calcolare l’angolo, il seno di viene mol-
tiplicato per un segnale di retroazione (cos ), dove è
l’angolo risultante dalla tabella di ricerca in memoria.
Analogamente, il coseno di viene moltiplicato per il
segnale di retroazione (sin ). Lo scopo di questa mol-
tiplicazione è risolvere la formula generale: (sin A ×
cos B) – (sin B × cos A) per ottenere sen (A – B).
dove è approssimazione dell’angolo del resolver e K
è una costante.
L’uscita del comparatore differenziale, in forma digi-
tale, viene trasferita direttamente ai blocchi digita-
li per eliminare l’onda portante (o la
componente sin t) con un circuito di
rilevamento sincrono. Questo blocco
di rilevamento sincrono utilizza come
riferimento il segnale di retroazio-
ne dell’eccitatore. L’uscita risultante,
V ERR, è inviata al circuito di controllo
digitale di tracciamento (tracking) per
generare l’angolo di uscita desiderato.
La retroazione negativa della configu-
razione dell’anello di controllo utilizza-
ta in questa architettura RDC contribu-
isce a ridurre su base continuativa il
segnale V ERR in modo che risulti mol-
to prossimo allo zero. Per bassi valori di – , V ERR
è quasi zero. Il circuito di retroazione digitale, grazie
alla correzione continua, approssima l’errore a zero in
modo tale che l’angolo di uscita ipotizzato dell’RDC ( )
risulti uguale all’angolo dell’albero del resolver ( ).
Come visibile in figura 2, il segnale V
ERR
viene inviato
all’anello di controllo PI (servo circuito diretto Tipo II).
Sono possibili molte topologie di controllo per l’imple-
mentazione del tracking dell’anello.
Una delle configurazioni di controllo della retroazione
più comuni prevede l’uso di un’azione di tipo integrale.
[3,4]
Il vantaggio di questa configurazione di controllo è
la sua capacità di ridurre praticamente a zero l’errore
di tracking nello stato stazionario. Tuttavia, è necessa-
rio prendere le opportune precauzioni, in quanto un
guadagno leggermente eccessivo relativa all’azione
integrale può causare delle oscillazioni nel sistema o
addirittura instabilità. Questa problematica si risolve
Fig. 2 – Architettura semplificata di un’architettura RDC (Resolver-to-Digital)