
















 34 / 86
34 / 86

ANALOG/MIXED SIGNAL
ELECTRIC VEHICLE
34
- ELETTRONICA OGGI 460 - MARZO 2017
re uno spostamento angolare durante il funzionamen-
to del resolver ad alta velocità. Pertanto, è necessario
fare attenzione nella scelta di eventuali condensatori
di modo comune che possono venire aggiunti al circu-
ito per filtrare il rumore. Questi condensatori di modo
comune possono incidere sensibilmente sul rapporto
di fase dei segnali del resolver e causare uno sbilan-
ciamento fra gli output di seno e coseno, che può pro-
vocare un errore nell’angolo di output dell’RDC. Inoltre,
le derive di offset nell’AFE e la linearità dei DAC posso-
no incidere sensibilmente sull’accuratezza dell’angolo
convertito.
Fattori ambientali
Il campo magnetico esterno proveniente dal circuito di
controllo del motore e gli elevati valori di tensione pre-
senti in un circuito elettrico possono
influenzare l’accoppiamento magnetico
del resolver e causare un errore. Soli-
tamente si utilizza la schermatura dei
cavi per prevenirne gli influssi sui se-
gnali del resolver, insieme alla proget-
tazione di filtri sull’input del convertito-
re del resolver per escludere eventuali
segnali indesiderati. La reiezione al ru-
more di modo comune dell’architettura
RDC è un elemento di fondamentale im-
portanza. In caso contrario, si assisterà
a una penalizzazione del rapporto se-
gnale/rumore (SNR) e della distorsione
armonica totale (THD).
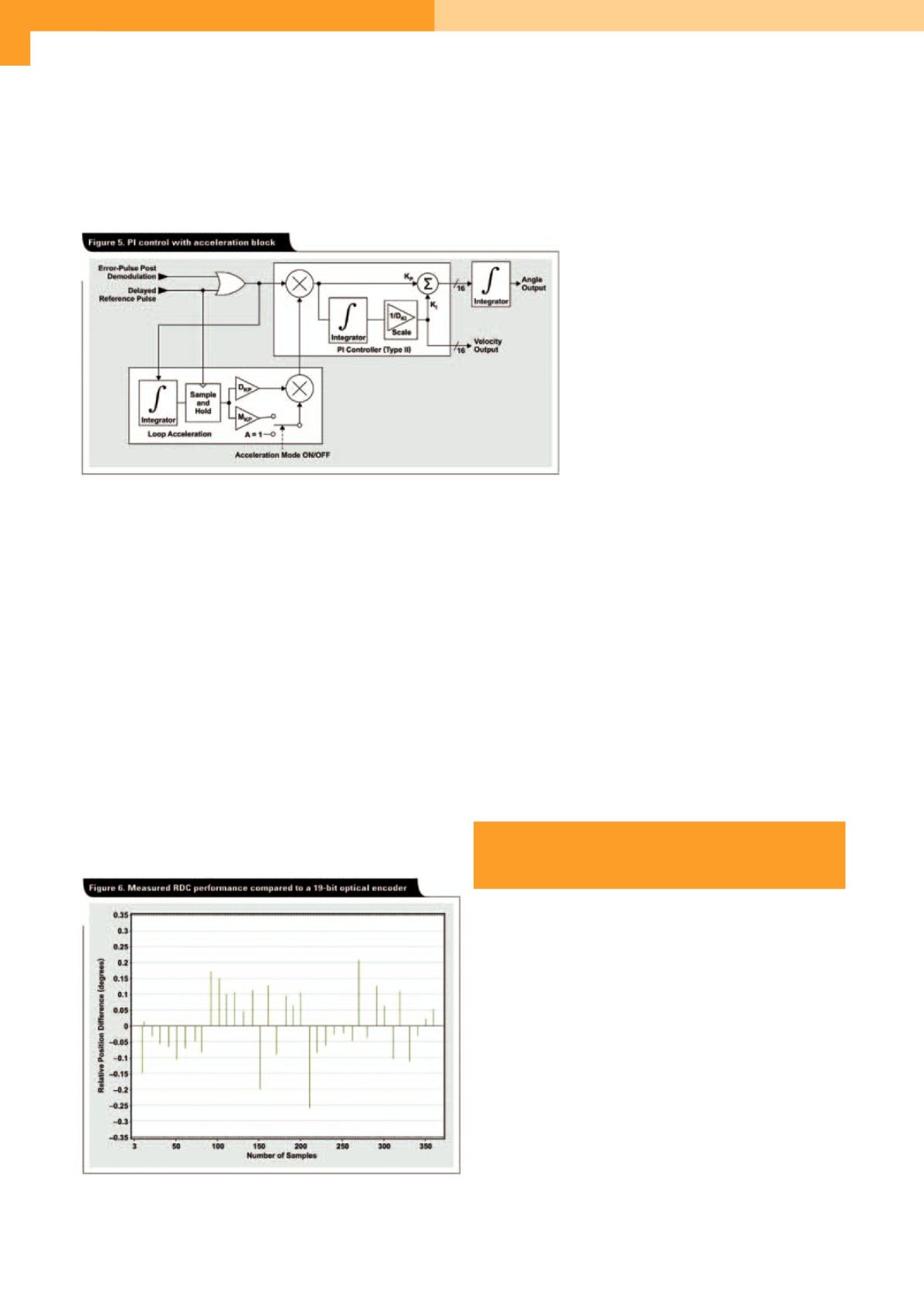
Prestazioni dell’RDC rispetto a un encoder ottico a
19 bit
Per comprendere meglio le prestazioni del resolver, si
è proceduto a un confronto tra i risultati di una RDC
a 12 bit con quelli di un encoder ottico a 19 bit. La
struttura meccanica comprende un resolver e un en-
coder ottico montati sullo stesso albero. La differenza
di posizione relativa è stata misurata e rilevata (Fig.
6). La differenza relativa esclude qualsiasi rumore di
modo comune nel sistema che potrebbe causare un
disallineamento nei valori assoluti. Gli errori fra la de-
viazione d’angolo assoluto della RDC a 16 bit misurata
e l’encoder ottico a 19 bit sono inferiori a ±0,25 gradi.
Bibliografia
[1]
Ankur Verma e Amanda Weise, «Rotary position sens-ing
for electric vehicles», Parte I, EDN, 2 ottobre 2015
[2]
Foglio dati PGA411-Q1, Texas Instruments, 2015
[3]
Ron Mancini, «Feedback and Stability Theory», bibliogra-
fia Texas Instruments, (SLOA077)
[4]
Irfan Ahmed, «Implementation of PID and Deadbeat
Controllers with the TMS320™ Family», Rapporto
Applicativo, Texas Instruments (SPRA083)
[5]
Dave Wilson, «Teaching Your PI Controller to Behave (Part
1)», Motor Drive & Control, blog E2E™, Texas Instruments,
20 luglio 2015
[6]
Martin Staebler, «Designing an EMC-compliant interfa-
ce to motor position encoders – Part 1», Motor Drive &
Control, blog E2E, Texas Instruments, 31 agosto 2015
Gli autori desiderano ringraziare
Toru Tanaka di Texas
Instruments
per il lavoro iniziale relativo alla definizione
di sistema RDC
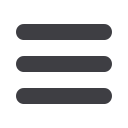
Fig. 5 – Controllo PI con blocco di accelerazione
Fig. 6 – Prestazione dell’RDC rispetto a un encoder ottico a 19 bit