

















 38 / 86
38 / 86

DIGITAL
ETHERCAT
38
- ELETTRONICA OGGI 451 - GENNAIO/FEBBRAIO 2016
un quinquennio, trascorso il quale la sua produzione risulta
anti-economica. Da qui l’obsolescenza del componente. Tutto
ciò non è compatibile con i cicli di vita dei sistemi industria-
li, espressamente ideati per garantire cicli di vita uguali o
superiori a 15 anni. Anche i programmi “Fit, Form, Function”
(Funzionalità, Forma e Dimensioni), in base ai quali i moduli
di memoria realizzati con le più recenti tecnologie di produ-
zione sono basati su forme e funzionalità dei dispositivi delle
precedenti generazioni, non garantiscono la totale assenza
di modifiche ai datasheet: da qui la necessità di procedere
a una riqualificazione. L’adozione di XMC4800, così come di
tutti i microcontrollori della linea XMC4000, permette di risol-
vere questo problema grazie alla disponibilità garantita fino
ad almeno il 2027 (Fig. 1).
Sensori e azionamenti oltre a EtherCAT
Oltre al controllore slave EtherCAT, XMC4800 è corredato da
numerose periferiche integrate (visibili nello schema a bloc-
chi di Fig. 2) per soddisfare le esigenze di una pluralità di
applicazioni.
In aggiunta al già menzionato processore ARM Cortex M4,
alla memoria flash di 2 MB (max.) e alla memoria RAM di 352
KB (max.), XMC4800 dispose di numerose risorse di comuni-
cazione, oltre che di controllo di sensori e azionamenti. Nes-
sun altro dispositivo basato su un core Cortex M mette a di-
sposizione 6 nodi CAN grazie ai quali è possibile organizzare
256 MO (message objects) in FIFO di invio/ricezione così da
consentire la comunicazione con un’interazione minima con
la CPU. Anche lo scambio di informazioni con differenti reti
CAN caratterizzate da diverse velocità di trasmissione ha
luogo in modalità gateway, quindi senza coinvolgimento del
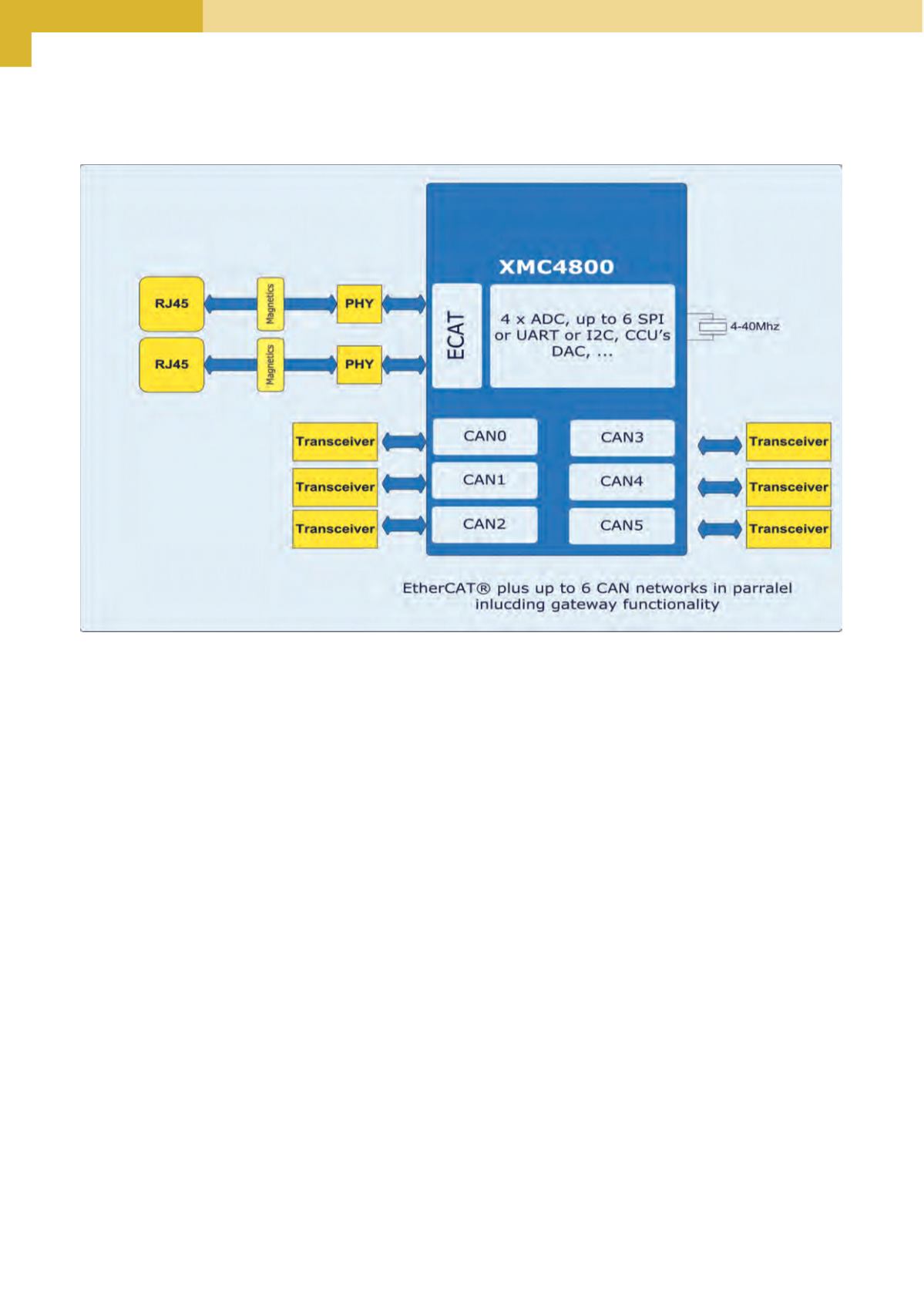
core di elaborazione. XMC4800 si propone come un’elegante
soluzione per l’implementazione in reti miste CAN ed Ether-
CAT, consentendo di stabilire in modo efficace un gateway
tra CAN ed EtherCAT attraverso trasferimenti DMA (Fig. 3).
Vi sono pure sei interfacce seriali (UART, SPI, SPI doppia
e quadrupla, I2C, e I2S) che possono essere implementate
attraverso l’interfaccia USIC programmabile. Sono altresì
previste interfacce parallele (EBU) e USB oltre a un’inter-
faccia SDIO/SD/MMC per la connessione con dispositivi di
memorizzazione di massa. Per eseguire compiti di diagno-
stica remota o locale è disponibile un’interfaccia Ethernet
TCP/IP. Oltre a queste interfacce di comunicazione, l’integra-
zione dell’IP analogica e a segnali misti è il tratto distintivo
di XMC4800. Essa integra quattro convertitori A/D a 12 bit,
quattro demodulatori delta-sigma e due interfacce per en-
coder sul lato sensore. Per gli azionamenti sono disponibili
due timer per il controllo di due ponti interi, quattro timer
per i semi-ponti e due convertitori A/D a 12 bit. Ciò permette
il controllo di un massimo di due motori, compreso il rileva-
mento della posizione, attraverso resolver o encoder, mentre
la comunicazioni EtherCAT è attiva simultaneamente (Fig. 4).
Fig. 3 – EtherCAT e CAN possono girare simultaneamente su XMC4800 – anche come gateway – senza richiedere un circuito ASIC per EtherCAT
dedicato, memoria esterna o generatori di impulsi di clock al quarzo