

















 28 / 86
28 / 86

POWER
ENCODER TECHNOLOGY
28
- ELETTRONICA OGGI 451 - GENNAIO/FEBBRAIO 2016
Come ridurre i consumi
degli azionamenti utilizzati
nelle applicazioni mobili
F
ino a non molto tempo fa, robot autonomi
e droni sono stati più o meno appannaggio
esclusivo di aziende o agenzie governative
di grandi dimensioni come ad esempio quelle del
settore militare. Attualmente queste tecnologie
sono divenute più accessibili e un’ampia gamma
di applicazioni commerciali a basso costo si sono
affacciate sul mercato. Tra i potenziali campi di
utilizzo dei droni civili si possono annoverare
rilevamento delle colture, ispezione dei cavi di
alimentazione, monitoraggio dell’ambiente o stu-
dio della fauna selvatica. Gli esperti di previsioni
suggeriscono che questi mercati potrebbero gen-
erare fatturati dell’ordine di parecchi miliardi di
dollari nell’arco dei prossimi 10 anni. Nelle applicazioni sul
campo robot mobili, agili e offerti a prezzi sempre più accessi-
bili possono essere impiegati per espletare una grande varietà
di compiti quali automazione di magazzino oppure per svolgere
numerose mansioni nel settore dell’agricoltura. Piccoli dispos-
itivi robotizzati rappresentano già un valido ausilio nei lavori
domestici come ad esempio aspirare la polvere o tagliare l’erba
in giardino. In un prossimo futuro, robot sempre più “intelligenti”
dotati di funzionalità di movimento e posizionamento sempre
più sofisticate potrebbero garantire un aiuto ancora più effi-
cace in ambienti domestici o di ufficio per l’espletamento di
compiti legati alla pulizia, sicurezza, produttività o consegna
di merci.
Dopo molti anni, le applicazioni dei robot mobili sono uscite dal
mondo della fantascienza per approdare in quello reale. Mo-
bilità significa funzionamento a batteria e, nel momento in cui
il mercato di espande e le richieste degli utilizzatori finali au-
mentano, ogni mA/h di energia della batteria diventa sempre
più prezioso. Una gestione attenta del ridotto budget di potenza
disponibile è essenziale per consentire al robot di lavorare di
più e funzionare per un tempo più lungo con una carica com-
pleta. Oltre a ciò, poiché una maggior efficienza si traduce in
una riduzione degli sprechi di energia, i progettisti possono
sfruttare l’opportunità di utilizzare batterie più piccole e legge-
re, con riflessi favorevoli sul funzionamento e sulle dimensioni
del dispositivo finale.
Le piattaforme mobile e aree utilizzate in numerose applicazioni
emergenti incorporano un gran numero di motori elettrici uti-
lizzati non solo per pilotare ruote o rotori, ma anche per numer-
osi meccanismi di posizionamento e azionamenti che spesso
richiedono il controllo del movimento a più assi. Il consumo di
potenza di un motore può variare da parecchi Watt (nel caso
di un meccanismo di posizionamento di piccole dimensioni) a
decine di Watt (o anche più) nel caso di applicazioni di trazione
o sollevamento. Per ogni motore vi è un’unità di controllo/pilot-
aggio che dissipa parecchia potenza. Se si riesce a minimizzare
la potenza dissipata dal sistema a motore nel suo complesso
è possibile disporre di una maggiore quantità di energia per
compiere lavoro utile e l’effetto complessivo, nel caso di più mo-
tori, permette di ottenere notevoli vantaggi nella realizzazione di
Jeff Smoot
VP - Motion Control
CUIGrazie all’impiego di encoder di tipo capacitivo le
applicazioni mobili alimentate a batteria, come ad
esempio robot o droni civili, possono operare per
un tempo più lungo con una singola carica
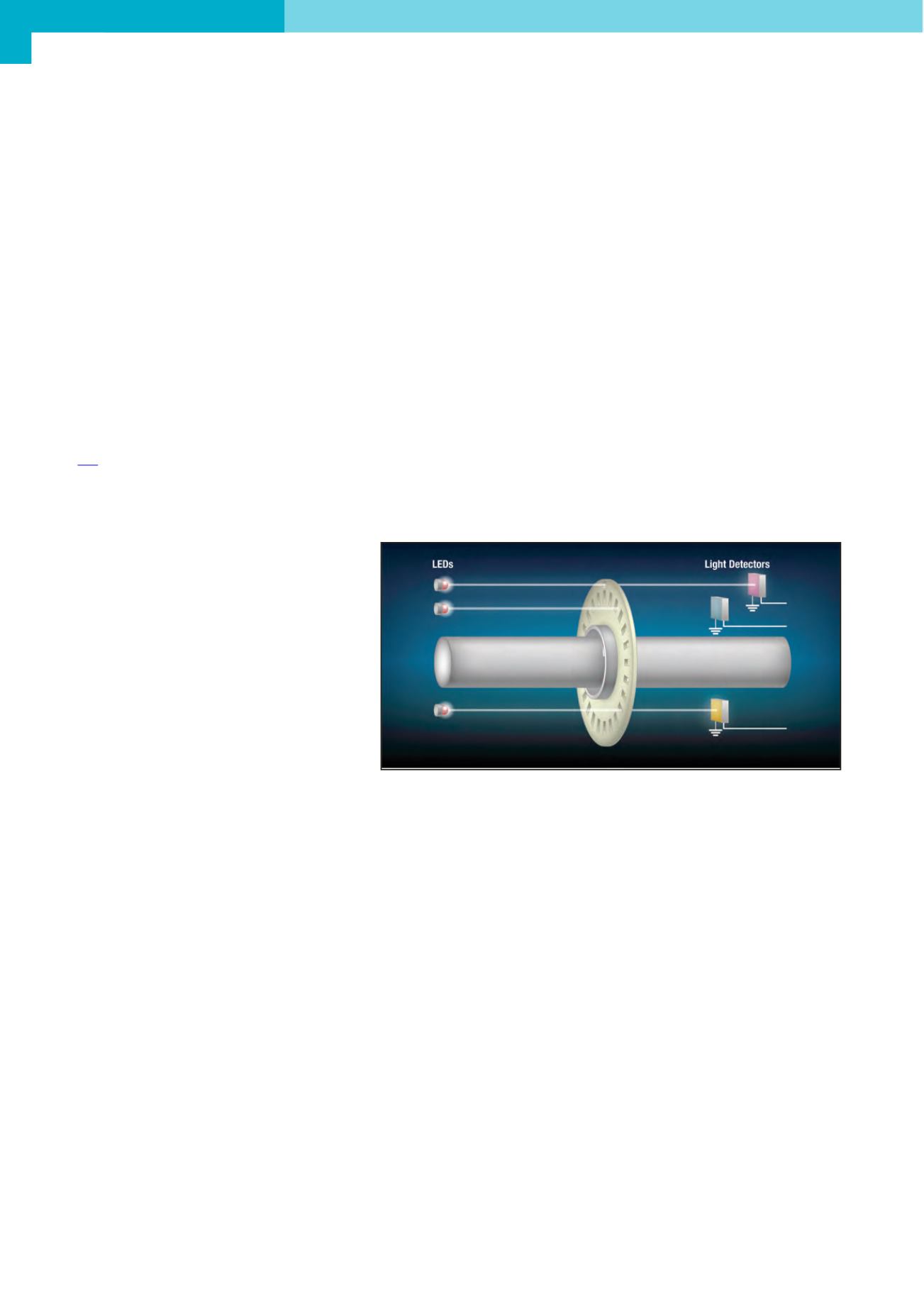
Fig. 1 – Un encoder ottico è formato da sorgenti LED, ricevitore e disco ottico dotato di
fessure