

















 29 / 86
29 / 86

POWER
ENCODER TECHNOLOGY
29
- ELETTRONICA OGGI 451 - GENNAIO/FEBBRAIO 2016
robot in grado di garantire migliori prestazioni pur utilizzando
batterie più piccole.
La scelta dell’encoder, utilizzato per acquisire le informazioni
sulla posizione necessarie al controllore per eseguire l’algo-
ritmo di controllo vettoriale del motore, può avere un impatto
significativo sull’efficienza energetica dell’intero sistema. Nei
sistemi che impiegano più motori, il risparmio energetico deri-
vati dalla scelta di un encoder efficiente può avere un effetto
significativo sul budget di potenza. Tra tutte le tecnologie dis-
ponibili per la realizzazione di un encoder, quella di tipo capac-
itivo non solo permette di aumentare in modo significativo l’ef-
ficienza, ma garantisce anche una maggiore affidabilità, con
conseguente riduzione degli oneri di manutenzione, dei costi
di sviluppo e del time to market.
Migliorare il controllo motore
Attualmente gli encoder più comune-
mente utilizzati sono quelli di tipo ottico e
magnetico. Un encoder ottico è composto
da una sorgente a LED e da un sensore
ottico che rileva la luce trasmessa o rifles-
sa da un disco ottico montato sull’albero
motore (Fig. 1). Due LED in quadratura
consentono il rilevamento sia della direzi-
one sia della velocità del motore. Un terzo
LED può essere utilizzato per monitorare
una singola marcatura sul disco al fine di
fornire un impulso di indicizzazione per il
sistema di controllo motore.
La risoluzione dell’encoder, in termini di
impulsi per giro (ppr - pulses per revolu-
tion) dipende dal numero di fessure, spa-
ziate in modo molto preciso, presenti sul disco. Nonostante sia-
no caratterizzati da un’elevata precisione, gli encoder di tipo
ottico presentano numerosi svantaggi, tra cui la vulnerabilità
a polvere, grasso o condensa che possono accumularsi sul
disco e provocare false (o mancate) letture. La luminosità dei
LED, inoltre, diminuisce con il trascorrere del tempo e alla fine
i LED si bruciano, fatto questo che comporta la sostituzione
dell’encoder.
Per quanto concerne l’efficienza energetica, gli encoder di tipo
ottico assorbono una quantità abbastanza elevate di corrente
che aumenta al crescere del livello di risoluzione impostato
e in presenza di formati di segnali di uscita più complessi. Il
passaggio dal livello di risoluzione più basso a quello di ele-
vato comporta un assorbimento di corrente più che doppio.
Quando di imposta il livello di risoluzione più elevato alcuni
encoder possono assorbire una corrente fino a 85 mA. Ques-
to dato può sembrare poco significativo se confrontato con la
potenza consumata dal motore ma, in presenza di una tensione
di 5V, il consumo dell’encoder è pari 0,425W. In un sistema che
prevede quattro motori il consumo dell’encoder è pari a 1,7W.
Riducendo l’assorbimento di energia dalla batteria l’applicazi-
one sarebbe in grado di far funzionare altri sistemi (come ad
esempio telecamere presenti a bordo, sensori o piccoli aziona-
menti) per un lungo periodo di tempo.
Gli encoder di tipo magnetico rappresentano una valida al-
ternative e, poichè non richiedono la visibilità reciproca (LOS
– Line Of Sight), non sono vulnerabili a errori imputabili a
fenomeni di contaminazione. Oltre a ciò gli encoder magneti-
ci possono operare anche se immersi in fluidi non conduttivi
come ad esempio i lubrificanti. D’altro canto l’accuratezza e la
risoluzione della posizione sono solitamente inferiori rispetto
a quelle degli encoder ottici e, in funzione del tipo di encoder
magnetico, la massima corrente può variare in un intervallo
compreso tra 20 e 160 mA (e superiore).
Un’alternativa competitiva rispetto alle tecnologie magnetica
e ottica è rappresentata dagli encoder di posizione rotativi di
tipo capacitivo che permettono di ottenere sensibili risparmi in
termini di consumi nelle applicazioni dove sono presenti più
motori come ad esempio i robot mobili. Gli encoder di questo
tipo possono essere allineati in maniera molto più semplici e
accurata durante il setup iniziale del motore, fatto questo che
può contribuire a un ulteriore risparmio energetico e consen-
tire l’uso di motori più piccoli, leggeri e contraddistinti da con-
sumi inferiori.
Encoder capacitivi: principi di base
Gli encoder di tipo capacitivo sfruttano il medesimo principio
utilizzato per la realizzazione dei calibri per la regolazione fine,
noti per le loro caratteristiche di accuratezza, affidabilità, preci-
sione ed economicità.
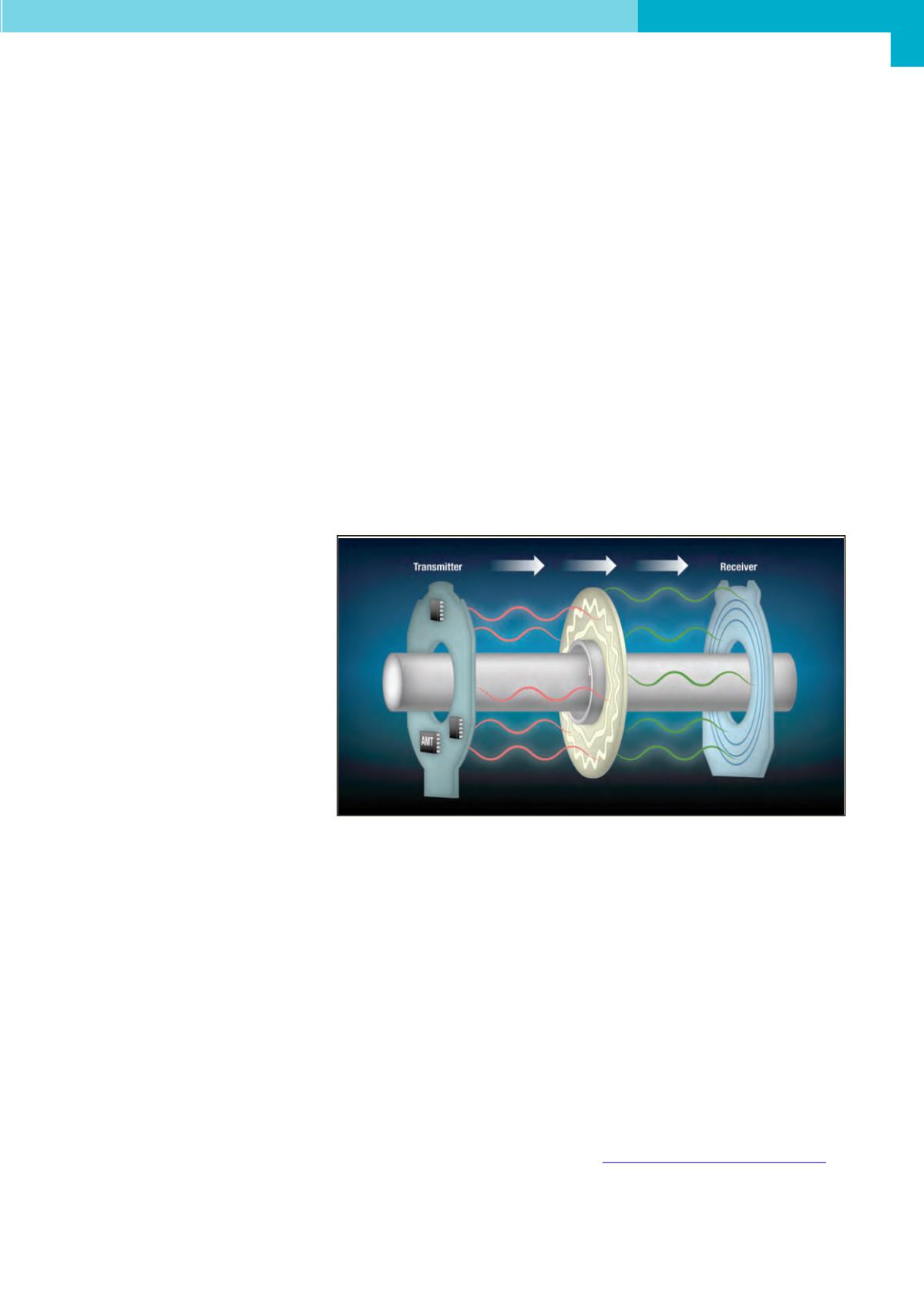
Gli encoder capacitivi della serie AMTdi
CUI, come visibile in figura 2, sono formati da un elemento fis-
so e da uno mobile. Ciascuno di essi ha due pattern di strisce o
Fig. 2 – Un encoder capacitivo utilizza lo stesso principio dei calibri per la regolazione fine