

















 30 / 86
30 / 86

POWER
ENCODER TECHNOLOGY
30
- ELETTRONICA OGGI 451 - GENNAIO/FEBBRAIO 2016
linee in modo da creare un condensatore variabile configurato
come una coppia trasmettitore/ricevitore. Nel momento in cui
l’encoder ruota il movimento dell’elemento collegato all’albero
motore modula l’uscita in modo da produrre un segnale unico
e predicibile. L’encoder integra un circuito ASIC (Application
Specific Integrated Circuit) che interpreta questo segnale e lo
utilizza per calcolare la posizione dell’albero e la direzione di
rotazione per generare le uscite in quadratura standard. Con
l’ausilio di un processore presente a bordo, il circuito ASIC e un
microprocessore possono operare in sinergia per generare us-
cite più complesse come ad esempio gli impulsi di commutazi-
one necessari per i motori BLDC (in continua senza spazzole) o
le uscite seriali negli encoder assoluti.
Il principio di funzionamento di tipo capacitivo consente agli
encoder di preservare l’accuratezza in ambienti dove è pre-
sente sporcizia o polvere come ad esempio in un magazzino, in
uno stabilimento produttivo o in un’apparecchiatura situata in
ambienti esterni. Come gli encoder magnetici, anche quelli di
tipo capacitivo possono essere immersi in fluidi non conduttivi
come i lubrificanti. Ciò, oltre a evitare il ricorso a costose sig-
illature del disco, consente di minimizzare gli oneri legati alla
pulizia o alla sostituzione del disco, spesso necessaria quando
si usano gli encoder ottici. Nel contempo gli encoder capacitivi
garantiscono un’accuratezza del tutto paragonabile, se non su-
periore, rispetto a quella offerta dai dispositivi realizzati con le
altre tecnologie: l’accuratezza tipica di un encoder capacitivo
è di 0,2°.
Un ulteriore vantaggio degli encoder capacitivi è la possibilità
di regolare in modo dinamico la risoluzione. Gli encoder di tipo
ottico, per contro, hanno una risoluzione fissa per cui nel caso
sia richiesta una diversa risoluzione è necessario utilizzare un
encoder differente. La risoluzione regolabile non sono garan-
tisce vantaggi in fase di sviluppo, consentendo ai progettisti
di apportare qualsiasi modifica al prototipi in modo semplice
e rapido, ma contribuisce anche a una più efficiente gestione
della catena di fornitura in produzione permettendo l’uso di
un’unica SKU - (Stock-Keeping Unit – articolo da tenere a mag-
azzino) per più controlli motore caratterizzati da una differente
risoluzione. L’alloggiamento dell’encoder è stato progettato
per semplificare l’assemblaggio e supportare varie opzioni di
montaggio. Oltre a ciò sono previste boccole di adattamento
per consentire l’installazione dell’encoder su alberi di differenti
diametri.
Risparmio energetico e migliore efficienza Gli encoder della
serie AMT richiedono correnti di valore molto basso: alcuni
modelli assorbono una corrente inferiore a 10 mA in corrispon-
denza del livello di risoluzione più elevato. In un sistema a quat-
tro motori operanti a 5V ciò corrisponde a una potenza di 0,2W.
A questo punto è utile ricordare che gli encoder di tipo mag-
netico e ottico possono assorbire correnti di valore molto più
elevato, il che comporta un sensibile incremento del consumo
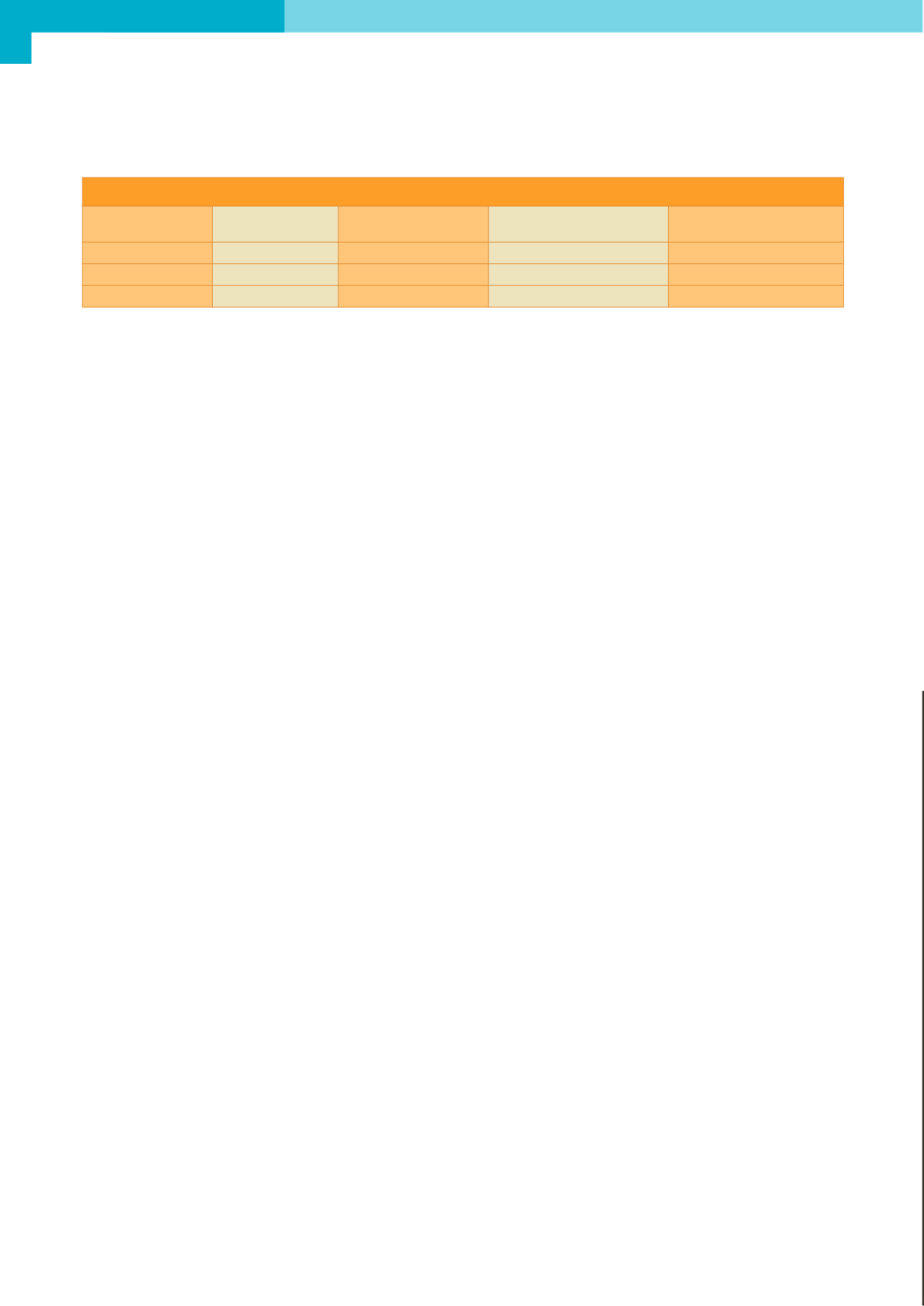
di potenza complessivo di un sistema con più motori. Nella ta-
bella 1 è riportata la potenza consumata dagli encoder in un
sistema con quattro motori, come ad esempio un drone o un
robot mobile, confrontando le prestazioni degli encoder capac-
itivi della famiglia AMT di CUI con quelle di encoder di tipo ot-
tico e magnetico.
Gli encoder capacitivi si propongono come una soluzione più
efficiente in termini energetici e offrono ai progettisti una mag-
giore libertà nella gestione del limitato budget di potenza dei di-
spositivi mobili e alimentati a batteria. Oltre a ciò, la corrente di
funzionamento di un encoder capacitivo è indipendente dalla
risoluzione impostata, così da permettere l’ottimizzazione delle
impostazioni dell’encoder senza compromettere il consumo di
potenza dell’applicazione.
Quando accoppiati con un motore BLDC, gli encoder capaci-
tivi consentono di effettuare in modo semplice e veloce l’azzer-
amento digitale per allineare i segnali U, V e W dell’encoder
con gli avvolgimenti del rotore. Per allineare un encoder ottico
il rotore è solitamente bloccato in una posizione nota e il dis-
co è allineato fisicamente. Quindi si procede all’inversione del
moto (back-driving) del motore mentre con un oscilloscopio si
verifica il corretto allineamento della forza controelettromotrice
(back-EMF) e dei punti di attraversamento dello zero dell’en-
coder. Si tratta di un processo iterativo che può richiedere
un tempo compreso tra 15 e 20 minuti e potrebbe non elim-
inare completamente alcuni errori di lieve entità. Questi errori
impediscono al motore di funzionare alla massima efficienza,
sprecando “preziosa” energia della batteria. È anche possibi-
le che l’impossibilità di ottimizzare l’allineamento costringa il
progettista a sovra-specificare il motore per ottenere la coppia
desiderata.
Per contro l’azzeramento digitale ottenuto programmando l’en-
coder mediante un applicativo software assicura sempre un
allineamento perfetto. Questo processo richiede pochi secondi
ed elimina qualsiasi variabilità tra le diverse unità. Al motore
viene fornita energia per bloccare il rotore nella posizione de-
siderata e l’encoder viene impostato a zero in questa posizione
utilizzando un singolo comando: Nessun altro tipo di strumento
è richiesto. Grazie all’allineamento accurato e ripetibile, questa
Tabella 1 – Confronto dei consumi di potenza di encoder realizzati con differenti tecnologie
Encoder (modello)
Tecnologia
Tensione
di funzionamento
Corrente assorbita
alla massima risoluzione
Potenza richiesta
in un sistema a 4 motori
AMT10
Capacitiva
5V
6mA
0,12W
Concorrente 1
Ottica
5V
85mA
1,7W
Concorrente 2
Magnetica
5V
160mA
3,2W