


















 26 / 104
26 / 104

26
- ELETTRONICA OGGI 441 - NOVEMBRE/DICEMBRE 2014
TECH INSIGHT
MICROROBOT
Stando a un rapporto della società di ricerche di mercato
GIA
(Global Industry Analysts), il comparto globale dei si-
stemi CAS (computer assisted surgical), ossia le attrezzature
di chirurgia computer assistita, nel 2020 dovrebbe raggiun-
gere i 4,5 miliardi di dollari, guidato sia dalla loro migliorata
affidabilità, sia dall’incremento del numero di procedure MIS
(minimally invasive surgical) eseguite a livello mondiale. Se
gli Stati Uniti risultano il mercato più grande per i sistemi
CAS, l’area Asia-Pacifico è quella per cui si prevede la più
rapida crescita, con un CAGR del 17% nel periodo analizzato.
Parlando nello specifico delle tecnologie, all’interno del
comparto dei sistemi CAS, sono proprio i robot chirurgici
i dispositivi che rappresentano nel mercato la categoria di
prodotti più grande e in più rapida espansione, grazie anche
alla crescente fiducia degli utenti nella precisione di tali at-
trezzature.
I microrobot submillimetrici possono essere pilotati per na-
vigare nei vasi sanguigni, fino a raggiungere punti difficili
da raggiungere con le tecniche convenzionali: ad esempio,
i coaguli di sangue formatisi nel cervello dei pazienti, che
attraverso tali microrobot si possono eliminare in maniera
molto meno invasiva rispetto all’uso dei tradizionali cateteri,
aumentando la percentuale di successo degli interventi.
Quando si tratta di realizzare microrobot chirurgici molto
miniaturizzati per procedure MIS, le sfide tecnologiche e in-
gegneristiche diventano ancora più complesse, rispetto ai
manipolatori e microrobot ideati per usi industriali. In me-
dicina e chirurgia, il robot deve essere progettato in manie-
ra compatibile con i requisiti del corpo umano, e ridotto a
dimensioni tali da arrecare il minor fastidio possibile al pa-
ziente. Occorre dotarlo di sistemi di locomozione adeguati, e
controllarlo in modalità remota e wireless.
In generale, i processi di miniaturizzazione dei robot han-
no potuto avvalersi dei progressi compiuti nelle tecniche di
microfabbricazione, e trarre benefici dalla diffusione di di-
spositivi come i MEMS (micro electro-mechanical systems),
senza contare i vantaggi di riduzione dei costi che possono
derivare dall’applicazione di tecnologie di produzione come
la stampa 3D.
A livello di funzionalità, le prossime generazioni di micro-
robot possiederanno la capacità di raggiungere con sem-
pre maggiore precisione una zona di tessuto colpita da una
patologia, per eseguire svariate tipologie di operazioni. Ad
esempio per rilasciare farmaci in maniera molto mirata, in
modo da ridurre gli effetti collaterali dei medicinali sul pa-
ziente, e aumentare la possibilità di successo dei vari trat-
tamenti. Le ridotte dimensioni di questo tipo di microrobot
medicali non consentono l’integrazione di batterie o motori
in senso tradizionale. Inoltre, a questi ordini di grandezza,
come si accennava all’inizio, il moto nei fluidi è influenzato
da una varietà di forze (interazioni, chimiche, forze di van
der Waals, forze di attrito viscoso e così via) di cui occorre
tenere conto nella progettazione del sistema di propulsione.
Per questa ragione, qui le soluzioni ingegneristiche devono
avvalersi del contributo di altre discipline: dalla fisica, alla
chimica, alla biorobotica, alla robotica biomimetica (biomi-
micry). Quest’ultima indirizza l’attività di progettazione ispi-
randosi ai principi di funzionamento dei sistemi biologici. Ad
esempio le soluzioni di propulsione possono essere realiz-
zate imitando i modelli di locomozione delle cellule, come le
cilia di un paramecio, o i flagelli di un batterio. Per quanto
riguarda i metodi di guida e controllo dei microrobot, le tec-
niche sono diverse. Si possono utilizzare, a seconda delle
esigenze, gradienti di vario tipo, o i campi elettromagnetici
e le radiofrequenze intrinsecamente disponibili, ad esempio,
nelle apparecchiature MRI (magnetic resonance imaging),
che possono agire stimolando microattuatori piezoelettrici.
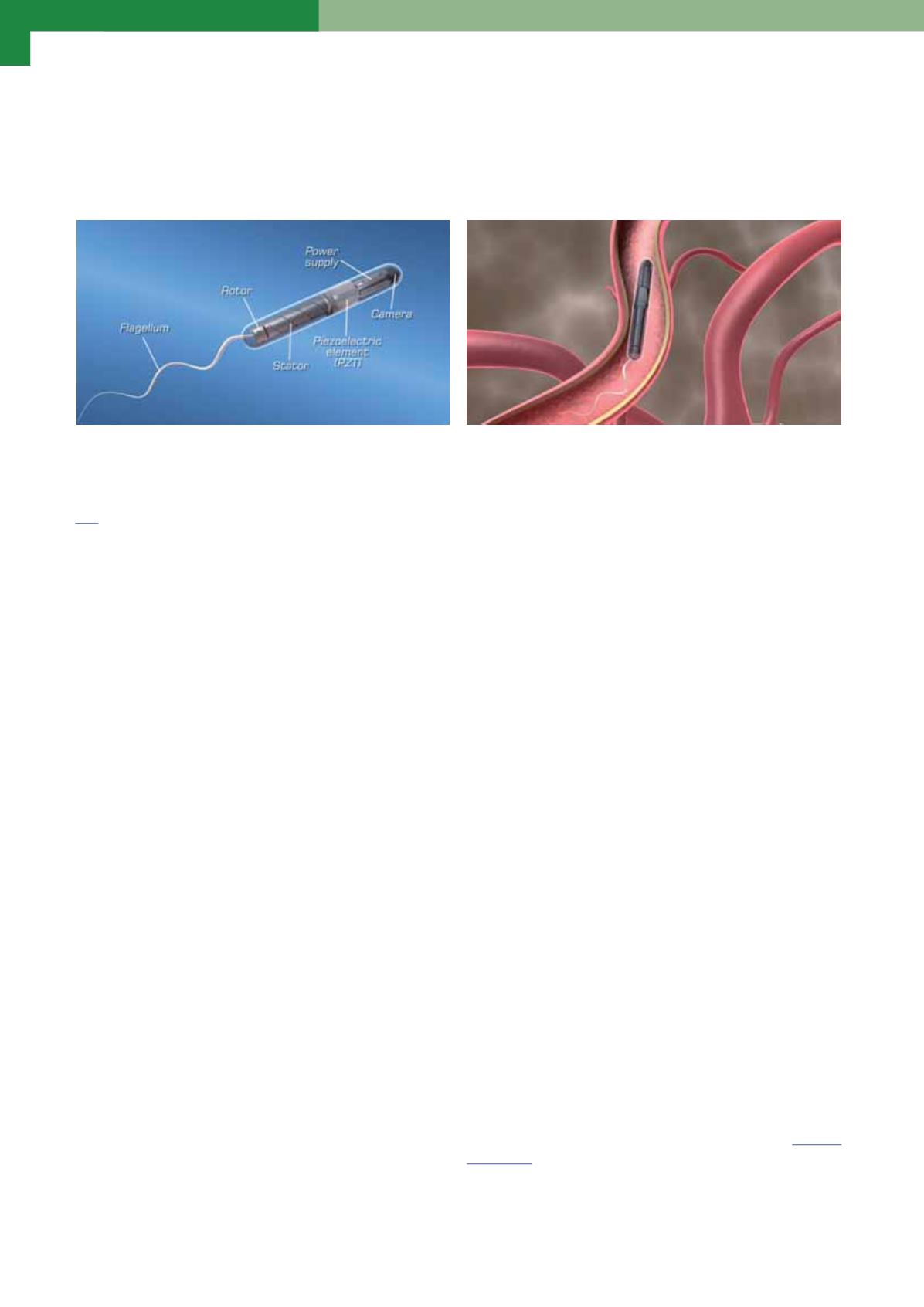
Un esempio può essere rappresentato da ‘Proteus’, un mo-
tore piezoelettrico per applicazioni MIS sviluppato qualche
anno fa nel laboratorio di micro e nano fisica del diparti-
mento di meccanica e ingegneria aerospaziale della
Monash
University
, a Clayton, Australia. Per questo motore, con un
diametro di 250 micrometri, è stata studiata una propulsione
flagellare, simile a quella del batterio Escherichia Coli.
Q
Figg. 3-4 – La struttura e le modalità d’impiego del microrobot Proteus