


















 25 / 104
25 / 104

25
- ELETTRONICA OGGI 441 - NOVEMBRE/DICEMBRE 2014
TECH INSIGHT
MICROROBOT
tificiale e collettiva, allo sviluppo degli algoritmi di coopera-
zione, agli aspetti ingegneristici legati ai sistemi di comuni-
cazione e alimentazione; agli attuatori, ai sensori, agli ASIC,
al packaging, all’integrazione, alla produzione di massa dei
microrobot.
Microfabbriche intelligenti
Quando il robot miniaturizzato raggiunge dimensioni molto
piccole, un problema è studiare soluzioni adatte per realiz-
zare il sistema di alimentazione e propulsione, specie quan-
do l’obiettivo è sviluppare sistemi ‘untethered’, ossia indi-
pendenti da fili o cavi esterni di alimentazione e controllo, e
quindi liberi di muoversi autonomamente. Il centro di ricer-
ca e innovazione indipendente
SRI International
– quartier
generale nella Silicon Valley – sta ad esempio sviluppando
una nuova tecnologia per controllare in modo affidabile mi-
gliaia di microrobot, da coordinare per la produzione intelli-
gente ed evoluta di vari tipi di materiali e prodotti in macro-
scala, attraverso sistemi compatti e integrati.
Per comprendere subito cosa ciò significhi, si immagini di
essere in grado di imbrigliare la potenza di un esercito di
operose formiche per assemblare prodotti su larga scala
rapidamente e in maniera precisa, partendo dall’impiego di
materiali eterogenei e dagli attuali ambienti di produzione.
La tecnologia brevettata da SRI si chiama DM3 (diamagnetic
micro manipulation), viene illustrata in un video, e usa sche-
de PCB (printed circuit board) come mezzo di guida e con-
trollo di microrobot costruiti sulla base di semplici magneti
a basso costo, che sono movimentati tramite energia elettro-
magnetica. In questo modo è possibile evitare di dover pro-
gettare un sistema di alimentazione e locomozione integrato
direttamente nel microrobot. Ma non solo: il sistema elet-
tromagnetico fornisce la possibilità di produrre in maniera
efficace sotto il profilo economico grandi numeri di micro-
robot in grado di gestire con affidabilità un’ampia varietà
di materiali, solidi e liquidi, inclusi i componenti elettronici.
SRI sta applicando la propria tecnologia di microfabbrica al
progetto dell’agenzia DARPA (Defence Advanced Research
Projects Agency), denominato
DARPA Open Manufacturing
Program
, e finalizzato a ridurre le barriere che ancora osta-
colano la fabbricazione economica di bassi volumi di siste-
mi a elevato valore.
I microrobot di SRI saranno utilizzati per costruire strutture
intelligenti con meccaniche ad alte prestazioni. L’idea è rea-
lizzare teste di assemblaggio costituite da migliaia di micro-
robot, per costruire prodotti in macroscala di alta qualità,
fornendo un controllo strutturale su scala millimetrica. Uno
scenario possibile potrebbe essere, ad esempio, quello in
cui alcuni microrobot trasportano componenti elettronici
o meccanici, mentre altri depositano liquidi, e altri ancora
eseguono analisi di qualità in loco. Montata su una base ro-
botica mobile, secondo SRI, una microfabbrica di questo ge-
nere diventerebbe in grado di costruire parti di qualunque
dimensione.
La tecnologia DM3 è anche stata messa a disposizione come
piattaforma di ricerca per università e ricercatori interessati
a esplorare nuove applicazioni per microrobot, in cui la mi-
croautomazione e il trattamento affidabile di materiali com-
positi eterogenei con manipolazione a livello di microscala
si rivelano critici.
Alcune potenziali applicazioni prospettate da SRI sono, ad
esempio, la realizzazione di soluzioni di fabbricazione ‘pick-
and-place’; i sistemi di prototipazione rapida (si pensi ad
esempio al tempo oggi impiegato da un progettista per as-
semblare il prototipo di un sistema elettronico manualmen-
te); la fabbricazione di componenti elettronici complessi e
ibridi, come i circuiti optoelettronici; gli utilizzi in campo
militare e spaziale, per la costruzione di elettronica non si-
licon-based; l’adozione nelle biotecnologie, in applicazioni
di microfluidica (lab-on-chip) e fabbricazione di tessuti; ma
anche tutta una varietà di applicazioni di microautomazione,
esterne rispetto al mondo del manufacturing, come le attrez-
zature compatte di diagnostica e ispezione, e i dispositivi
anti-sporcamento (anti-fouling), che mantengono pulite le
superfici ad esempio dai depositi di particolato. Insomma,
vi è una miriade di utilizzazioni possibili, senza contare che
poi i microrobot sono riprogrammabili per svolgere compiti
sempre nuovi e diversi.
Robot minimamente invasivi
In medicina e chirurgia, l’adozione di robot e microrobot
nelle diverse attività sta assumendo un ruolo crescente.
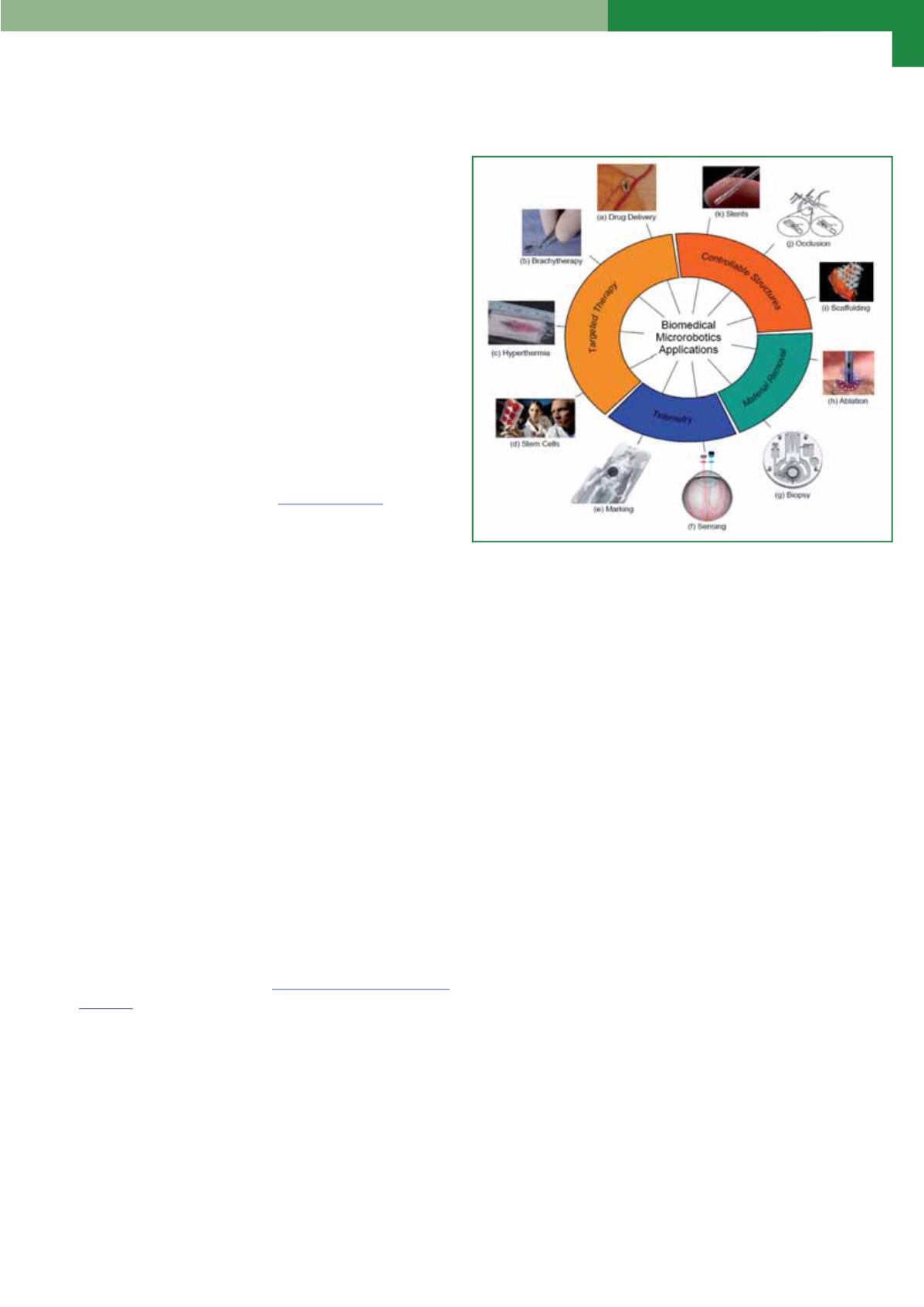
Fig. 2 – Alcune applicazioni di microrobotica biomedicale