
















 71 / 84
71 / 84

71
EMBEDDED
63 • FEBBRAIO • 2017
CONNECTED CAR |
SOFTWARE
terazioni necessarie per la
presenza di funzionalità
quali il controllo della ve-
locità di crociera e i sistemi
ABS, la complessità di que-
sti cablaggi è aumentata in
modo esponenziale.
La risposta a questo proble-
ma è rappresentata dallo
sviluppo di reti all’interno
del veicolo, solitamente sot-
to forma di reti CAN (Con-
troller Area Network). Una
rete di questo tipo fornisce
un mezzo per lo scambio dei
dati, consentendo lo sviluppo di un’architettura
di cablaggio uniforme indipendentemente dalle
À
>
1
-
sto modo risulta possibile integrare i moduli ap-
propriati mediante un semplice collegamento al
bus CAN.
Nel momento in cui il veicolo era isolato dal mon-
do esterno, questo tipo di collegamento tra i vari
moduli non presentava particolari rischi per la
sicurezza. Una volta dimostrato che i meccanismi
di comunicazione su una rete di questo tipo non
compromettevano l’integrità di ogni sistema che
li utilizzava, i sistemi stessi potevano essere con-
siderati separati e quindi conformi ai principi che
hanno ispirato lo standard ISO 26262.
L’avvento dei veicoli connessi ha contribuito a
mutare questo scenario. La possibilità di accesso
esterno comporta il rischio di qualche potenziale
attacco condotto attraverso un qualsiasi punto di
À
!
parte del sistema stesso che può essere esposta a
# .
À
-
co (4)
À
se è presente in un un sistema di basso livello
o non critico, in quanto le reti rappresentano un
vero e proprio portale verso i sistemi ASIL dei
livelli superiori. In altre parole, se qualcuno ha
condotto un attacco informatico al sistema di in-
fotainment di un’autovettura, non vuole dire che
non abbia la possibilità di accedere anche all’im-
pianto frenante.
Di conseguenza, un’auto connessa non potrà mai
garantire lo stesso livello di sicurezza di un’auto-
vettura non connessa (5) . Perché un veicolo con-
nesso possa essere considerato sicuro e conforme
ai requisiti previsti dallo standard 26262 è indi-
À
-
ché ottimizzare la separazione tra i vari sistemi.
Separazione basata sull’hardware
À ' $ 5 . $
-
5
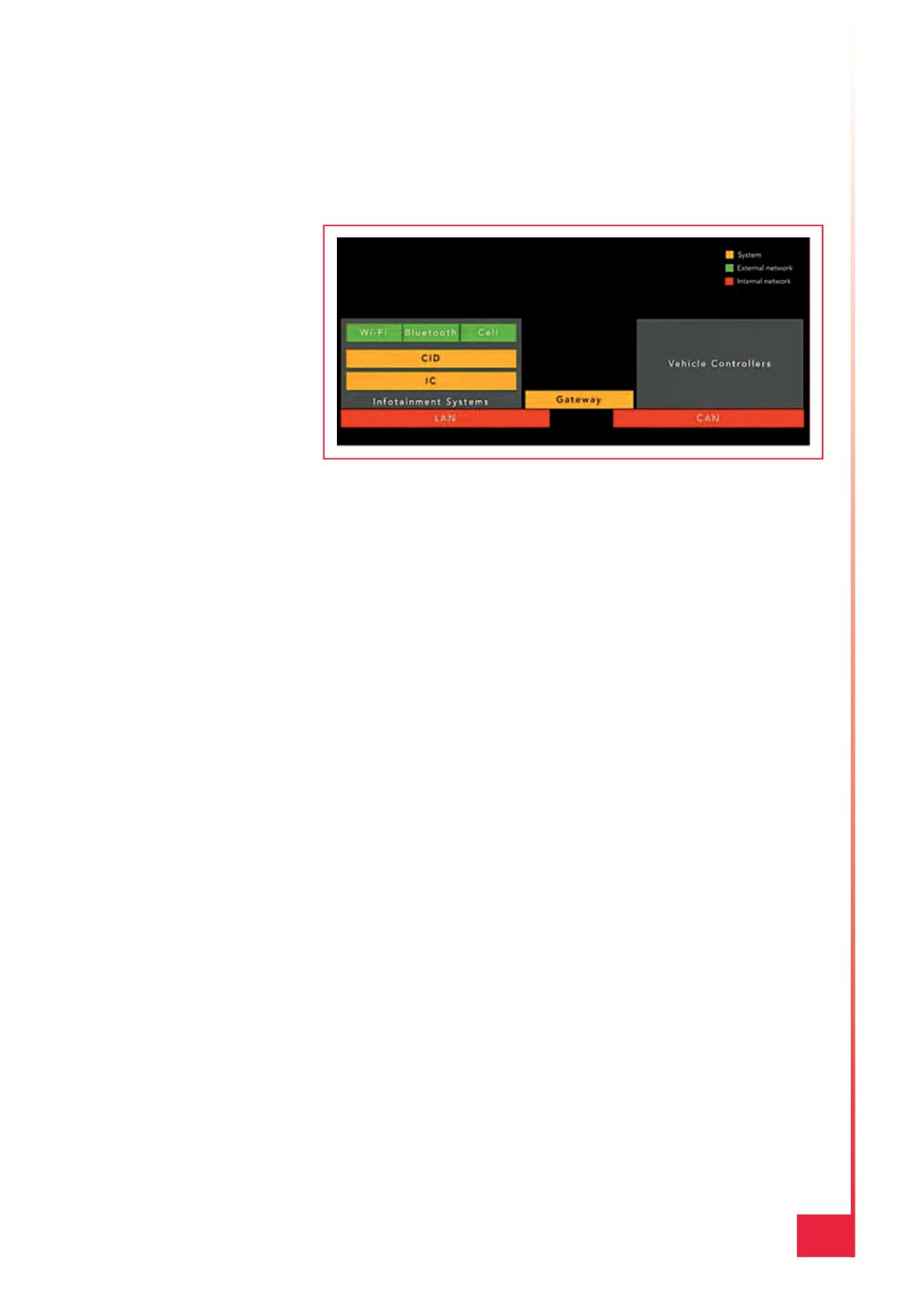
: + À !,=A" =A#
isolare il sistema di infotainment dal controllore
del veicolo che ovviamente è di tipo safety-criti-
cal (ovvero il cui malfunzionamento può produrre
danni di notevole entità). Il gateway implementa
una API strutturata che supporta una gamma li-
> 2
À
che per accedere ai controllori del veicolo è neces-
saria una conoscenza dettagliata di questa API.
Un approccio di questo tipo non si è comunque
dimostrato completamente sicuro, a conferma
À
di un’auto connessa. Senza dimenticare i note-
voli oneri economici da sostenere legati al costo
dell’hardware.
Separazione basata sul software
Sebbene il sistema adottato da Tesla rappresenti
À
riuscisse a individuare una soluzione altrettanto
valida, o anche migliore, basata sul software, è in-
dubbio che i costi sarebbero decisamente inferiori.
Una ricerca sui più popolari siti che si occupano
di elettronica per automotive utilizzando come
parole chiave “hypervisor embedded” evidenzierà
la sostanziale equivalenza delle varie proposte.
Per cercare di esaminare questo concetto in ma-
niera più approfondita, si consideri un sistema
analogo a quello di Tesla, astraendolo per questo
Fig. 1 – Nell’approccio adottato da Tesla la separazione è basata
sull’hardware