

















 79 / 86
79 / 86

EMBEDDED
54 • NOVEMBRE • 2014
79
SOFTWARE
RTOS
Non meno importante è poi la connettività. Con l’avven-
to e lo sviluppo della IoT, un numero sempre maggiore
di dispositivi embedded non risulta più isolato e relegato
ad attività tipiche dell’ambito industriale e di fabbrica. Le
reti di sensori, spesso formate da dispositivi in grado di
comunicare fra loro e con il Web in mo-
dalità wireless, sono presenti negli am-
biti applicativi più disparati: dai sistemi
di monitoraggio e controllo delle colture
agricole, ai sistemi di controllo industria-
li, ai dispositivi medicali per la cura in
remoto dei pazienti, in grado di spedire
dati diagnostici alle strutture ospedaliere.
Di conseguenza, gli attuali RTOS devono
soddisfare anche il requisito di supporta-
re tutti i principali standard e protocolli di
comunicazione – da Ethernet, a Wi-Fi, a
Bluetooth, e quant’altro – integrando na-
tivamente tutte le necessarie funzionalità
di networking.
Altro ‘must’,
differenziare i prodotti
Vi sono poi ulteriori caratteristiche che vanno a completa-
re il profilo di un RTOS di nuova generazione. Fra queste
c’è ad esempio la flessibilità dell’interfaccia grafica, che
assieme alla modularità del sistema, è molto importante
per riuscire a differenziare le funzionalità dei diversi pro-
dotti, specie in un mercato in cui si spazia da dispositivi
che possono andare dagli smartphone e tablet, ai device
medicali, ai sistemi di controllo industriale. Qui la qualità
dell’interfaccia uomo-macchina non si basa solo su moto-
ri grafici 2De 3D, ma anche sulla capacità di abilitare le
più moderne modalità d’interazione con l’utente, come gli
schermi a sfioramento (touchscreen).
Ancora, sempre più, nel quadro di evoluzione degli RTOS,
diventa critico per i fornitori di sistemi operativi mette-
re a disposizione dei costruttori di dispositivi un sistema
che, oltre a tutte le caratteristiche precedentemente sot-
tolineate, integra già in modo nativo, ‘out-of-the-box’, le
funzionalità software specifiche indispensabili per opera-
re nel particolare mercato verticale a cui
viene indirizzato. In altre parole, un RTOS
progettato per il mondo delle applicazioni
industriali dovrebbe già fornire agli OEM
driver, protocolli, e tutto il necessario sof-
tware middleware specifico per l’ambiente
di fabbrica, in modo da velocizzare le im-
plementazioni sui rispettivi device e ridur-
re il time-to-market necessario per il rila-
scio dei prodotti sul mercato. Allo stesso
modo, un RTOS personalizzato per il setto-
re medicale dovrebbe disporre già di fun-
zionalità e caratteristiche che lo rendano
adatto al funzionamento in conformità con
gli specifici requisiti e normative di safety
vigenti in un determinato paese.
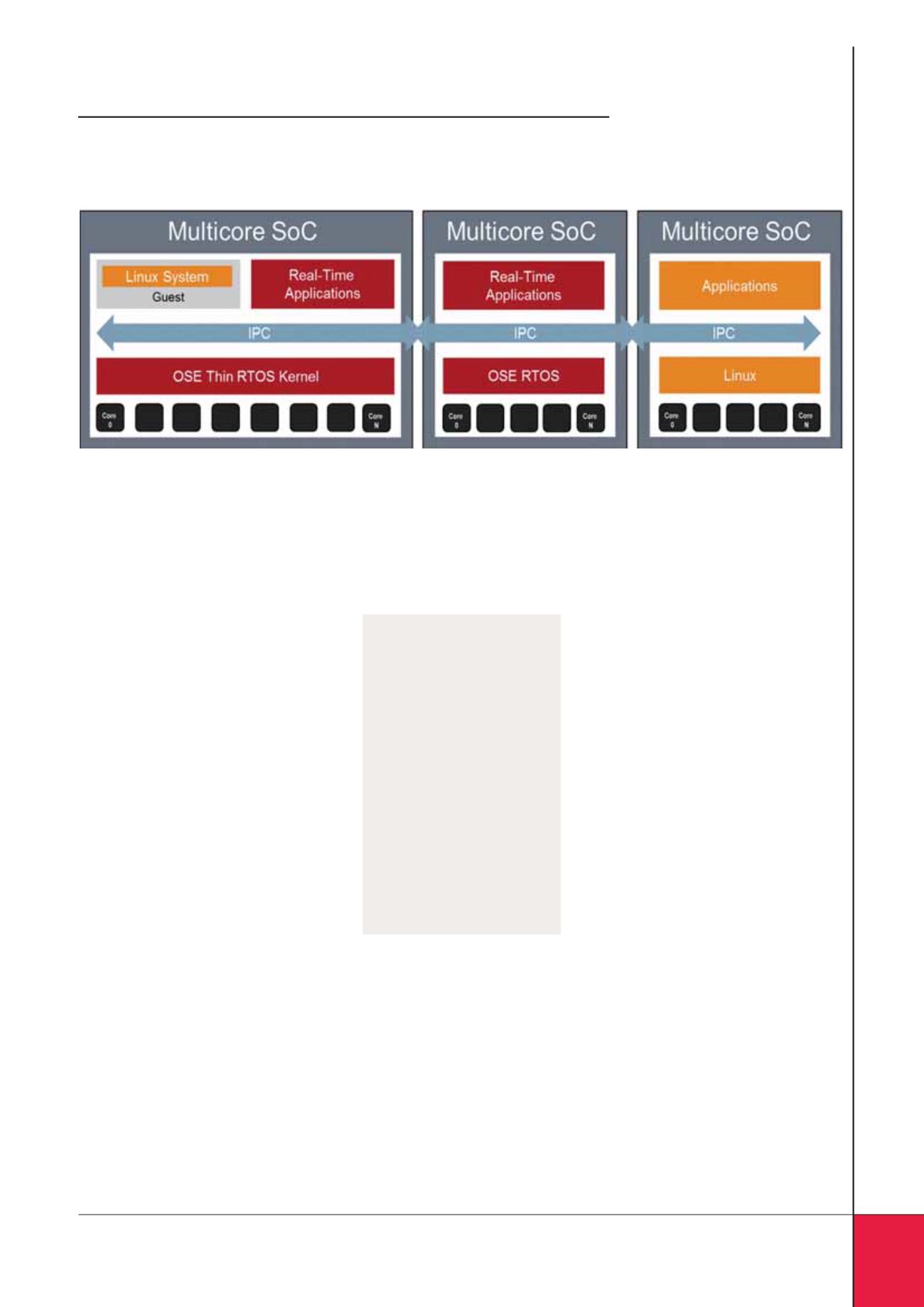
Richiamando i trend di evoluzione tecno-
logica citati al principio, non si può nem-
meno dimenticare la capacità richiesta ai moderni RTOS
di fornire il supporto software per un funzionamento effi-
ciente del sistema operativo e delle applicazioni anche su
architetture hardware di tipo multicore, e su processori
a 64 bit, che stanno emergendo in modo crescente come
piattaforme di riferimento. Altra caratteristica sempre più
rilevante, nel quadro di progressiva espansione dell’uso
delle piattaforme hardware multicore, è la tecnologia di
virtualizzazione. Quest’ultima, grazie ai software hyper-
visor, permette di consolidare molteplici piattaforme har-
dware su un singolo sistema multicore in grado di far fun-
zionare diversi sistemi operativi e applicazioni, anche con
requisiti real-time.
Fig. 3 – Il supporto multicore in Enea OSE permette la coesistenza del RTOS con Linux
Gli RTOS
stanno
evolvendosi per
sopravvivere
in un panorama
tecnologico
che si è
velocemente
allargato,
divenendo
molto più
complesso