
















 9 / 32
9 / 32

EON
EWS
n
.
606
-
MARZO
2017
9
borativi il tema di un uso
sicuro per gli esseri umani
si impone con maggiore ur-
genza. Oltre che con una
sensoristica avanzata, i co-
struttori stanno affrontando
l’argomento con criteri di ri-
dondanza per cui, se pure il
sistema di sensori deputati
a evitare la collisione con
l’uomo dovesse fallire, il ro-
bot si arresterebbe in ogni
caso.
Sono quindi proprio i sen-
sori la componente chiave
e in forte sviluppo sia del-
la automazione industriale
sia della smart factory. I
sensori consentono infatti
il rilevamento e la raccolta
dati che sono alla base del-
le applicazioni IoT.
L’efficienza dei processi
produttivi dell’industria 4.0
dipende pesantemente dal-
le tecnologie dei sensori.
Le categorie di sensori tipi-
che utilizzate nella robotica
sono le seguenti:
•
Sistemi di visione 2D e
3D
. In questo ambito, i
più recenti sistemi di vi-
sione 3D consentono ad
esempio di rilevare esat-
tamente le dimensioni e
ancorati in una postazione
alla quale l’operatore si av-
vicina solo al termine della
lavorazione, ad esempio
per recuperare l’oggetto e
trasferirlo allo step di lavoro
successivo.
I robot della logistica sono
mobili e movimentano pac-
chi o pallet dal magazzino,
per trasferirli altrove o vice-
versa. Sono dotati di molti
sensori per la localizzazio-
ne e il mapping, oltre che di
sensori anticollisione.
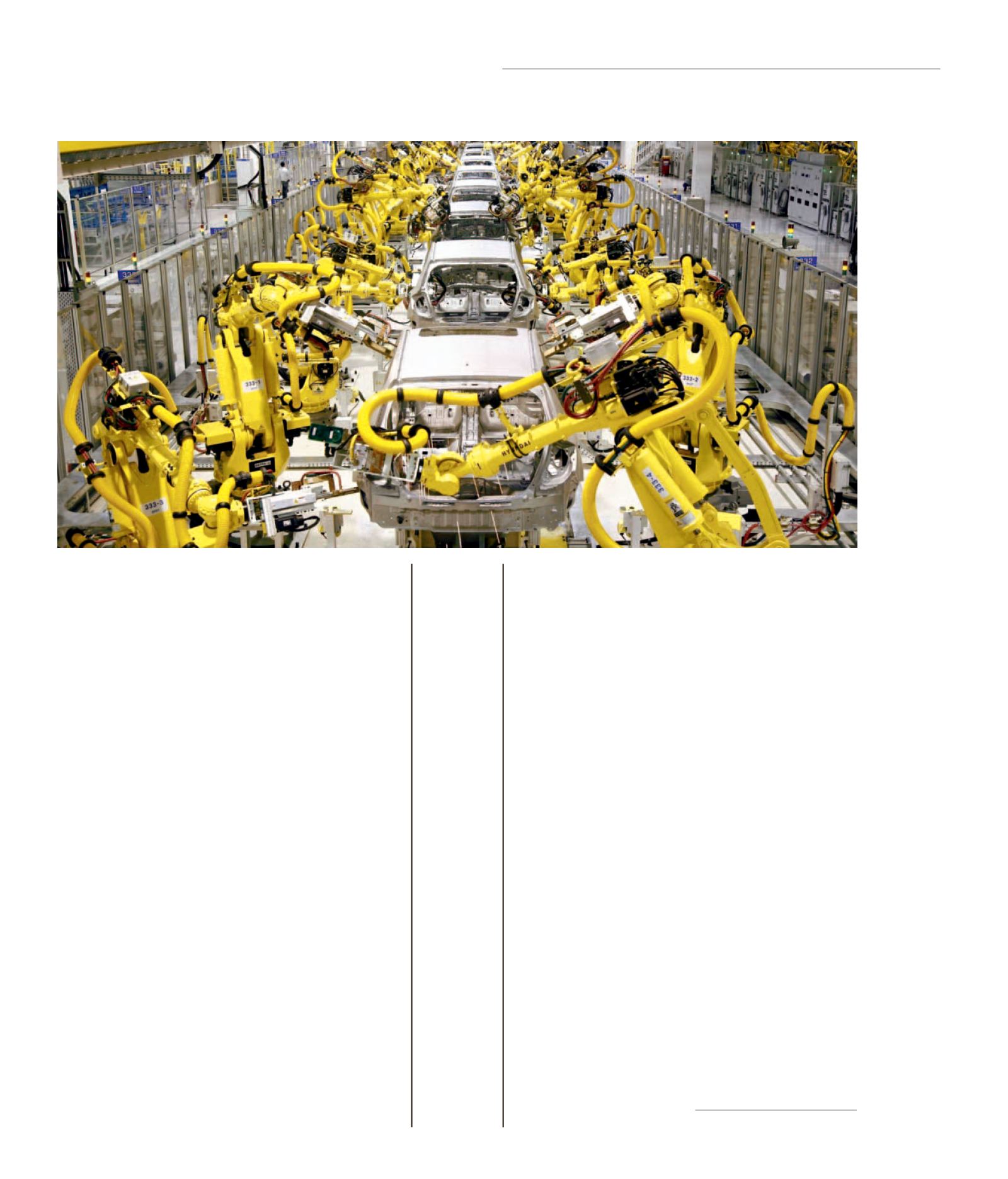
I robot collaborativi rappre-
sentano l’ultima frontiera
dell’innovazione.
Uomo
e macchina collaborano
fianco a fianco, lavorando
quindi sullo stesso oggetto,
in piena sicurezza. Sensori
molto avanzati e software
altamente intelligente ren-
dono oggi possibile tutto
ciò.
Le fabbriche attuali utiliz-
zano prevalentemente il
primo e il secondo tipo di
robot. Ma per l’avvento
della fabbrica intelligente è
necessario il passaggio al
terzo tipo.
Evidentemente, con la
diffusione dei robot colla-
la posizione degli oggetti
presenti in un contenitore/
cesto, al fine di afferrarlo
nel modo migliore.
•
Sensori di forza e cop-
pia.
Mentre i sensori e
sistemi di visione rappre-
sentano il senso della vi-
sta, quelli di forza e coppia
corrispondono al senso
del tatto. Il robot usa il
sensore forza coppia per
rilevare la forza che il suo
braccio sta applicando
nella parte finale. In gene-
re, questo tipo di sensore
è collocato infatti tra la
parte finale del braccio e
lo strumento che il robot
sta utilizzando. In questo
modo vengono monitora-
te tutte le forze che agi-
scono sul tool.
•
Sensori di rilevazione
della collisione
. Vengo-
no montati per lo più sui
robot collaborativi per ga-
rantire un’interazione si-
cura fra l’uomo e la mac-
china. Si tratta in genere
di sistemi di ricognizione
tattile nei quali viene rile-
vata una qualsiasi pres-
sione su una superficie
soffice e l’informazione
viene utilizzata dal si-
stema robot per limitare
immediatamente il movi-
mento o anche bloccarlo
ove necessario.
•
Sensori di sicurezza
.
Anche questi sensori
servono per proteggere il
lavoratore che collabora
con un robot e lo rallenta-
no o lo arrestano quando
l’essere umano si trovi in
un’area determinata. Pos-
sono avere varie forme,
ad esempio telecamera o
laser.
•
Sensori di sorveglianza
delle parti
. Se la pinza
del robot non afferra un
pezzo, questi sensori rile-
vano l’errore e il sistema
ripete l’operazione
•
Sensori tattili
. Si stanno
diffondendo molto, per lo
più per affinare la sensibili-
tà della pinza, rilevare esat-
tamente cosa afferra, quali
forze interagiscono sull’og-
getto e in taluni casi anche
le variazioni di calore.
*Si ringrazia Texas Instruments per la
collaborazione fornita.
continua a pag.10
Fonte https://ieltsintai-
wan.wordpress.com/R
EPORT