
















 99 / 102
99 / 102

XXV
MICRO
POWER 12 - NOVEMBRE/DICEMBRE 2016
Rilevazione dei guasti
Eccedere nella coppia di carico massima consentita del
motore può causare lo stallo del motore stesso e far sì
che l’avvolgimento assorba l’intera corrente. Quindi, per
proteggere il motore, deve essere implementato il rileva-
mento guasti in relazione a fenomeni di sovracorrente e
stallo. Per implementare il rilevamento di sovracorrente
viene aggiunta Rshunt al circuito del drive che fornisce
una tensione corrispondente al flusso di corrente nell’av-
volgimento del motore. La caduta di tensione ai capi della
resistenza varia in maniera lineare rispetto alla corrente
nel motore. Questo valore di tensione è inviata all’ingresso
invertente del comparatore e messa a confronto con una
tensione di riferimento basata sul prodotto tra la resisten-
za Rshunt e la corrente di stallo massima consentita per il
motore. La tensione di riferimento può essere fornita dal
FVR ed essere ulteriormente ridotta dal DAC. Ciò consen-
te di utilizzare una tensione di riferimento molto piccola,
che permette di utilizzare un basso valore di resistenza,
con conseguente riduzione della dissipazione di potenza
del Rshunt. Se la tensione su Rshunt supera quella di rife-
rimento, l’uscita del comparatore innesca la funzione di
shutdown automatico del CWG, la cui uscita rimarrà inat-
tiva fino al momento il cui non cesserà la causa del guasto.
La sovratemperatura può essere rilevata utilizzando l’indi-
catore di temperatura on-chip del dispositivo, che può mi-
surare temperature comprese tra -40 e +85 ˚C. Il circuito
interno dell’indicatore produce una tensione variabile in
funzione della temperatura che viene convertita in forma
digitale da un convertitore A/D. Per un indicatore ancor
più preciso della temperatura, può essere implementato
una calibrazione su un singolo punto.
Anello esterno
L’anello esterno, riportato in figura 2, controlla la velocità
del motore in condizioni variabili (variazioni nella doman-
da del carico, disturbi e deriva termica). La velocità è misu-
rata dal SMT, un counter-timer a 24 bit con clock e logica
per il gating (abilitazione del segnale) può essere configu-
rata per misurare vari parametri del segnale digitale come
ampiezza dell’impulso, frequenza, duty cycle e differenza
temporale tra i fronti su due segnali di ingresso. La misura
della frequenza di uscita del motore può essere effettuata
attraverso la modalità acquisizione del perido e del duty
cycle dell’SMT. In questa modalità è possibile acquisire il
duty cycle o il periodo del segnale dell’SMT rispetto al clock
dell’SMT stesso. L’SMT esegue il conteggio del numero dei
clock dell’ SMT presenti in un singolo periodo della rota-
zione del motore e memorizza i risultati nel registro dei pe-
riodi rilevati. L’utilizzare di questo registro consente di otte-
nere la frequenza reale del motore. Quando il riferimento
di velocità viene confrontato con la velocità reale, si otterrà
un errore positivo o negativo a seconda che la velocità reale
risulta superiore o inferiore rispetto al riferimento stabilito.
Questo errore viene inviato al controllore PI, un algoritmo
implementato in firmware che calcola un valore in grado
di compensare le variazioni di velocità. Que-
sto valore di compensazione verrà aggiunto
o sottratto al duty cycle PWM iniziale per
produrre un nuovo valore. In definitiva, nel-
le applicazioni di controllo motore dove il
costo rappresenta un elemento critico, l’uso
di un microcontrollore efficiente e flessibile
può avere un impatto rilevante. L’efficienza
del dispositivo può essere misurata prenden-
do in considerazione il numero di periferi-
che integrate necessarie per l’ottimizzazione
le operazioni di controllo, oltre al numero
di pin, alle risorse di memoria e alle dimen-
sione del package. Semplicità di utilizzo e
time-to-market sono due aspetti da tenere
in considerazione specialmente nel caso
siano richieste variazioni durante la fase di
progetto. Un microcontroller a basso costo
può soddisfare questi requisiti e permette al
circuito di pilotaggio di impostare il riferi-
mento di velocità, prevedere la posizione del
rotore, implementare un algoritmo di con-
trollo, misurare la velocità effettiva del moto-
re ed effettuare la rilevazione dei guasti.
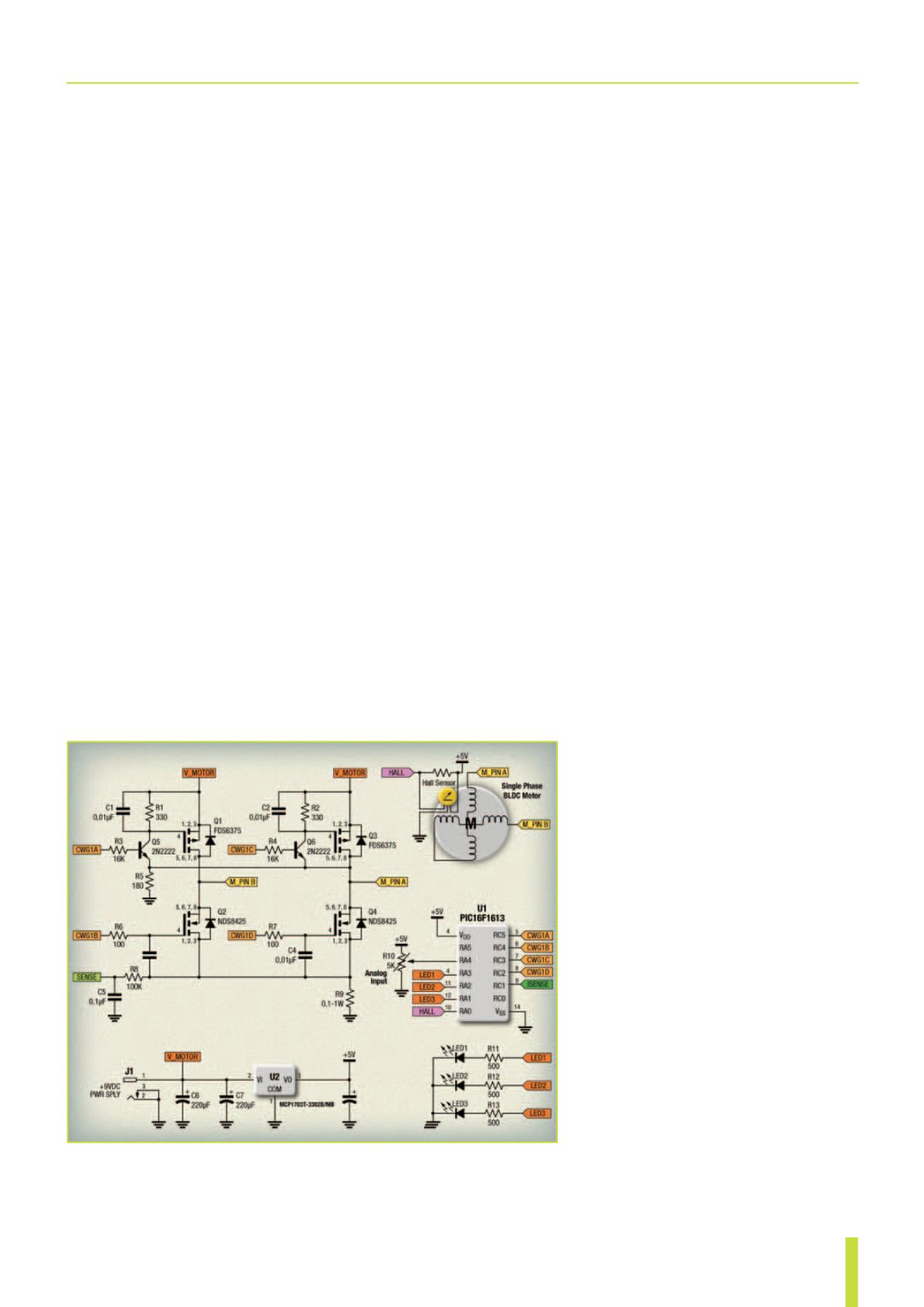
Fig. 3 – Schema a blocchi di un circuito di pilotaggio per motore
BLDC monofase