
















 97 / 102
97 / 102

XXIII
MICRO
POWER 12 - NOVEMBRE/DICEMBRE 2016
In un’applicazione che prevede l’uso di motori a bassa
potenza, dove i costi assumono un’importanza maggiore
rispetto alla complessità e i requisiti di coppia non sono
severi, un motore brushless DC (BLDC) monofase rappre-
senta una valida alternativa ai motori trifase.
Motori di questo tipo sono caratterizzati da bassi costi
grazie alla semplicità costruttiva, che ne facilita la realiz-
zazione. Inoltre, essi richiedono un sensore che rileva una
singola posizione e un numero ridotto di commutatori
per i driver adibiti al controllo e all’attivazione degli avvol-
gimenti del motore. Per questa ragione è possibile perve-
nire a un compromesso ragionevole tra costo del motore
e dell’elettronica di contorllo.
Per garantire costi ridotti è necessario ricorrere a un cir-
cuito economico per il pilotaggio (driver) del motore. Il
circuito di pilotaggio descritto qui
può sfruttare due anelli di retroa-
zione (feedback loop). Il primo,
il loop più interno, è reponsabile
del controllo della commutazione,
mentre il secondo, il loop più ester-
no, gestisce il controllo di velocità.
La velocità del motore è riferita a
una tensione analogica esterna e la
rilevazione dei guasti può essere ef-
fettuata nel momento in cui si veri-
ficano condizioni di sovracorrente
e sovratemperatura.
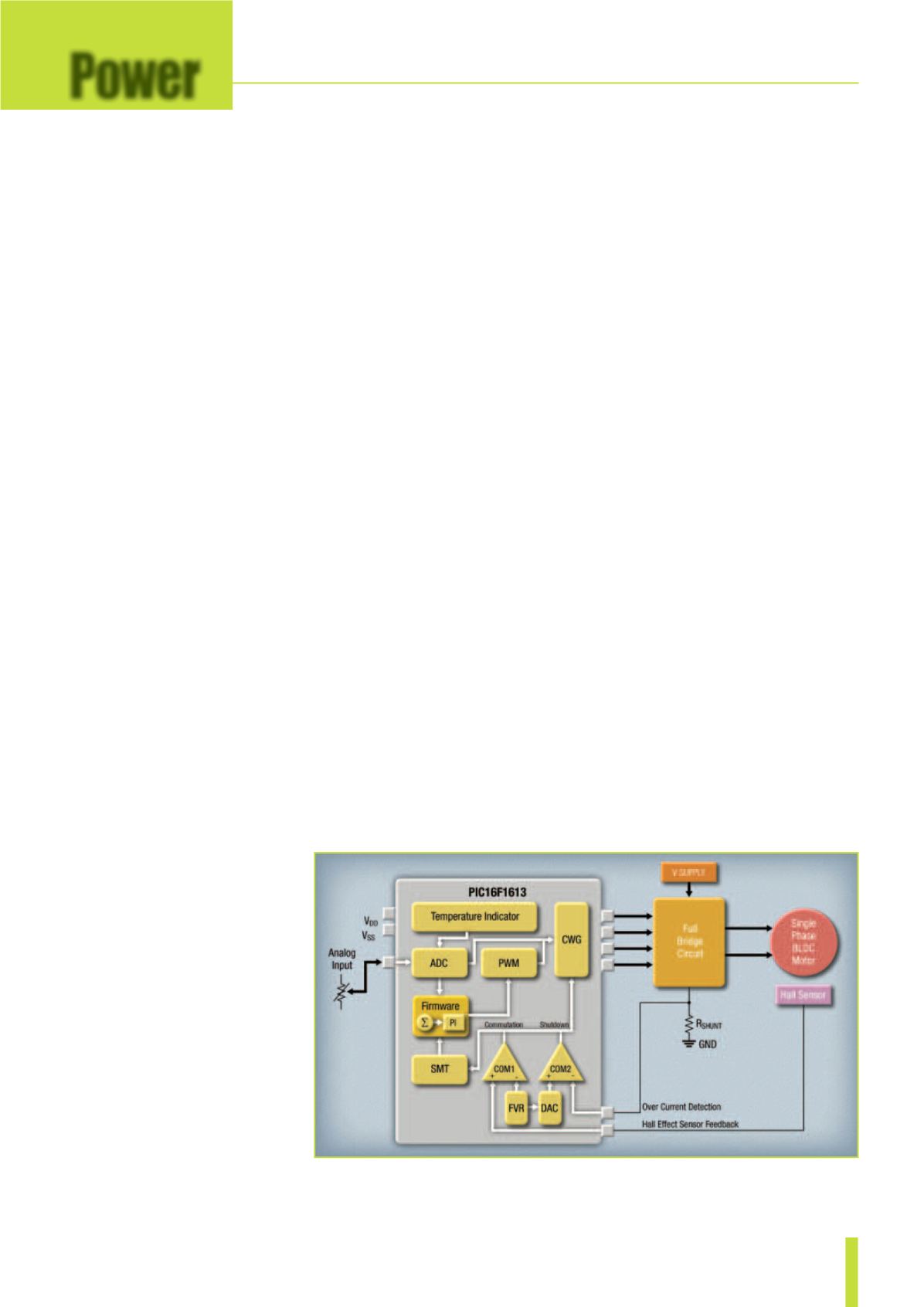
Nella figura 1 è riportato lo schema
a blocchi del driver monofase basa-
to sul microcontroller PIC16F1613
a 8 bit di Microchip. Questo dispo-
sitivo è stato scelto perché è caratte-
rizzatio da un ridotto numero di pin e integra a bordo le
periferiche richieste per controllare i commutatori del dri-
ver, misurare la velocità del motore, prevedere la posizione
del rotore ed effettuare il rilevamento guasti. In questa ap-
plicazioni vengono utilizzate le seguenti periferiche: CWG
(Complementary Waveform Generator); SMT (Signal Me-
asurement Timer); ADC (convertitori A/D), DAC (conver-
titori D/A) CCP (Capture Compare PWM), FVR (Fixed
Voltage Reference), timer, comparatore e e indicatore di
temperatura. Queste periferiche sono internamente con-
nesse attraverso il firmware, in modo da ridurre il numero
di pin esterni richiesti.
Il circuito a ponte intero (full-bridge) che attiva l’avvol-
gimento del motore è controllato dall’uscita generatore
CWG. Per determinare la posizione del rotore viene uti-
lizzato un sensore Hall. La corrente che fluisce attraverso
l’avvolgimento del motore viene convertito in una tensione
attraverso la resistenza di rilevamento Rshunt per la pro-
tezione da sovracorrente. La velocità può essere riferita a
un ingresso analogico esterno. Nella figura 2 è riportato lo
schema di controllo del driver del circuito di pilotaggio del
motore; per questa applicazione, la tensione nominale del
motore è pari a 5V e la velocità nominale è di 2400 rpm. La
Mike Gomez
Application Engineer
Mark Pallones
Team Lead
Microchip Technology
Come pilotare
un motore
BLDC monofase
Un microcontrollore a basso costo può essere utilizzato come circuito di pilotaggio
per un motore DC brushless monfofase ad avvolgimento singolo
Fig. 1 – Schema a blocchi di un driver per motori BLDC monofase
Power