















 44 / 86
44 / 86

DIGITAL
BACK-UP MEMORY
44
- ELETTRONICA OGGI 455 - GIUGNO/LUGLIO 2016
da un segnale di ingresso aggiuntivo che, una volta attivato,
porta il dispositivo in modalità “deep-sleep”. Una SRAM Po-
werSnooze di Cypress, per esempio, è caratterizzata da tem-
pi di accesso di 10 ns, nettamente inferiori rispetto a quelli
di una SRAM a basso consumo, compresi tra 45 e 55 ns. La
corrente assorbita in modalità “deep-sleep” varia da 10 a 20
uA, valori nettamente inferiori rispetto ai 30-40 mA consumati
in stand by da una SRAM veloce da 16 Mb. Nella tabella 1 è
riportato un confronto tra i principali parametri – velocità e
consumo di corrente – delle tre tipologie di memorie SRAM
prese in considerazione.
I progettisti di sistemi possono controllare l’ingresso nella
modalità “deep-sleep” attraverso un GPIO oppure monito-
rando la commutazione in maniera automatica utilizzando il
chip di supervisione. Nel caso di controllo mediante GPIO il
software può utilizzare la modalità “deep-sleep” della SRAM
analizzando gli accessi alla memoria stessa.
SRAM a basso consumo con batteria di back up
La necessità di un circuito aggiuntivo per le memorie con bat-
terie di backup deriva dal fatto che durante una caduta dell’a-
limentazione i controllori non sono più in grado di pilotare i
loro I/O. Sulle linee di segnale saranno quindi presenti livelli
logici intermedi che gradualmente andranno a un livello di
tensione basso (LOW) a causa delle perdite e della capacità
della scheda. La perdita di controllo significa che, anche se
la SRAM è alimentata dalla batteria, il segnale di “chip ena-
ble” andrà a livello logico basso, abilitando di conseguenza
la SRAM. Per evitare il verificarsi di questa eventualità, i pro-
gettisti impiegano un chip di supervisione per monitorare l’a-
limentatore della scheda e controllare il segnale di “chip ena-
ble” della SRAM. Nella figura 3 viene rappresentato lo schema
di un circuito di una SRAM a basso consumo che prevede
l’uso di un chip di superivisione. Tutti le linee dei dati e degli
indirizzi e i segnali di controllo sono pilotati dal processore.
Il segnale di chip enable attivo basso della SRAM è pilota-
to dal chip di supervisione che è pilotato dal segnale di chip
enable del microcontrollore. Nel caso di caduta dell’alimenta-
zione, il chip di supervisione assume il controllo del segnale
di “chip enable” della SRAM pilotandolo al livello logico alto e
ignorando il segnale di “chip enable” del controllore. Il chip di
supervisione effettua la commutazione dall’alimentatore del-
la scheda all’alimentatore
della batteria e disabilita
la SRAM, impedendo in tal
modo la perdita dei dati. Il
secondo segnale di “chip
enable”, essendo un se-
gnale attivo alto, è pilotato
direttamente dal control-
lore mediante un resistore
di pull down “debole” (la cui resistenza non ha un valore ele-
vato). Quest’ultimo garantisce che durante la caduta dell’ali-
mentazione il secondo segnale di “chip enable” viene portato
al livello logico basso disabilitando la SRAM.
SRAM veloci a basso consumo per applicazioni
con batteria di back-up
Il basso assorbimento di corrente in modalità “deep sleep”
delle SRAM veloci a basso consumo ne fanno la soluzione
ideale per applicazioni che ricorrono a una batteria di back
up in presenza di cadute di alimentazione. Durante il funzio-
namento normale la SRAM può essere fatta funzionare ad alta
velocità mentre in caso di caduta dell’alimentazione la SRAM
può commutare automaticamente in modalità “deep sleep”
commutando il segnale “deep sleep” nello stato logico basso.
La figura 4 illustra l’utilizzo di una SRAM che prevede la mo-
dalità “deep sleep”: come si può osservare non è necessario
apportare modifiche a un progetto esistente che fa ricorso a
una SRAM a basso consumo. Quando si verifica una caduta
dell’alimentazione, il chip di supervisione disabilità la SRAM
mentre il resistore di pull-down sul pin “deep sleep” porterà
automaticamente il segnale nello stato logico basso, consen-
tendo così alla memoria di entrare in modalità “deep sleep”. Il
chip di supervisione assicura che la SRAM rimanga disabili-
tata per tutte il periodo in cui l’alimentazione della scheda è
assente. Nel momento in cui viene ripristinata l’alimentazione,
il chip di supervisione continua a mantenere la SRAM disabi-
litata per tutto il periodo di timeout della funzione POR (Power
On Reset) del chip di supervisione.
Questo periodo di timeout può variare da 1 a 100 ms in fun-
zione del tipo di chip di supervisione utilizzato. Il periodo di
timeout consente la ripresa del funzionamento del controllo-
re che può quindi iniziare a controllare il segnale di “deep
sleep” e pilotarlo al livello logico alto. Ciò permette di tener
conto della sequenza di temporizzazione di uscita dallo sta-
to di “deep sleep” di una SRAM veloce a basso consumo e
consente ad essa di predisporsi per l’accesso da parte del
controllore. Le memorie SRAM veloci a basso consumo sono
caratterizzate da tempi di back-up equivalenti a quelli delle
tradizionali SRAM a basso consumo e garantiscono I miglio-
ramenti delle prestazioni richiesti dai progettisti di sistemi
grazie alla riduzione dei tempi di accesso alle SRAM stesse.
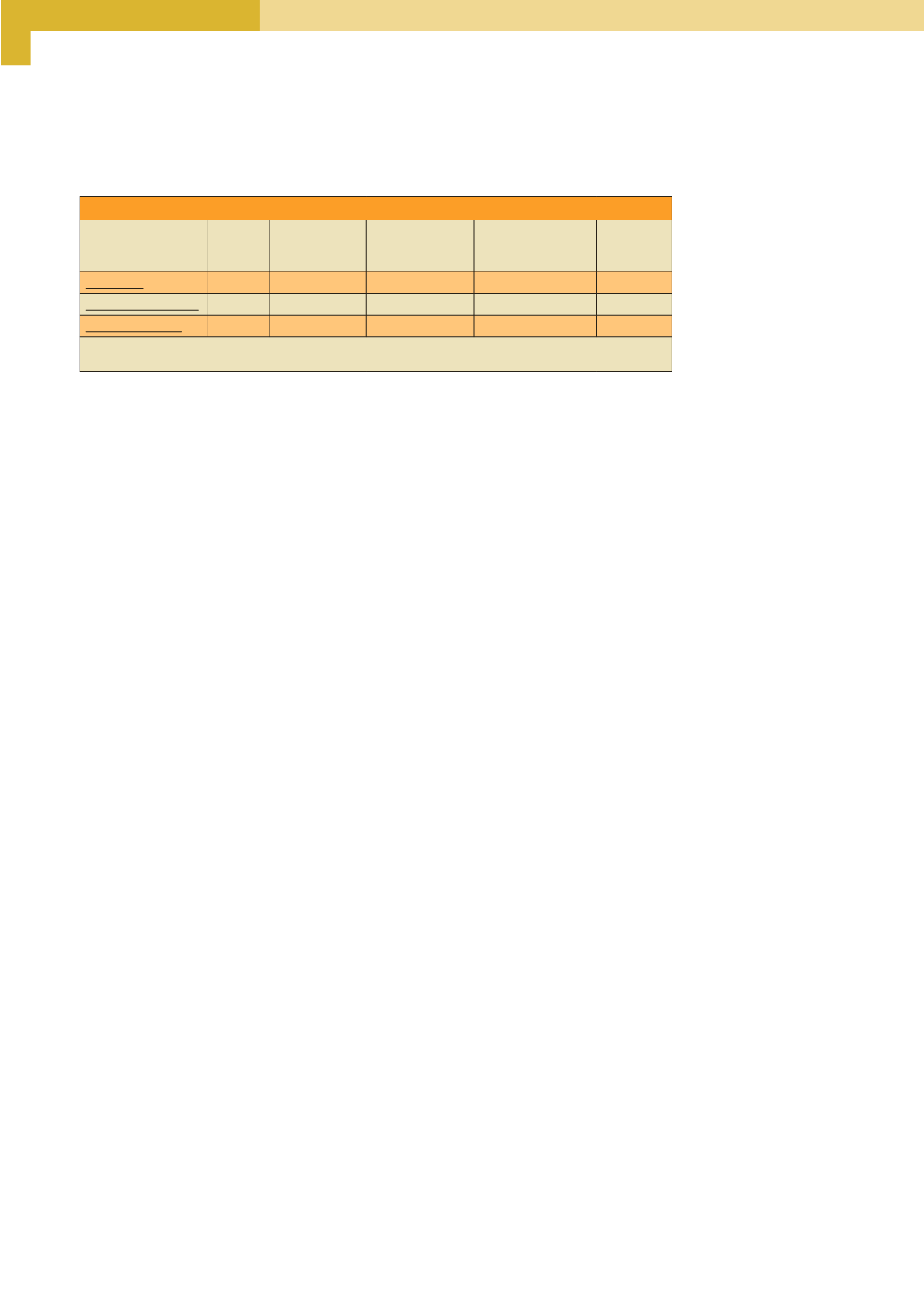
Tabella 1 – Confronto tra i principali parametri delle diverse tipologie di memoria SRAM
Tipologia di SRAM
Tempo
di accesso
Corrente
inmodalità attiva
ICC (max)
Corrente
inmodalità standby
ISB2 (tip.)
Corrente
inmodalità Deep-Sleep
IDS (tip.)
Durata
della batteria
++
SRAM veloci
10 ns
110 mA
20 mA
-
24 ore
SRAM a basso consumo
45 ns
36 mA
5,5 µA
-
>3 anni
SRAM PowerSnooze
10 ns
110 mA
20 mA
8 µA
>3 anni**
++: La durata della batteria è calcolata considerando una batteria a bottone da 240 mAH e consumo di corrente in standby tipico
**: La durata della batteria per la SRAM PowerSnooze è calcolata considerando il consumo tipico di corrente in modalità Deep-sleep