















 42 / 86
42 / 86

DIGITAL
BACK-UP MEMORY
42
- ELETTRONICA OGGI 455 - GIUGNO/LUGLIO 2016
L
e prestazioni di un sistema embedded sono
determinate dalle risorse hardware e software
disponibili. Una parte di un programma scritta in
maniera corretta è in grado di ottimizzare le prestazioni
dell’hardware, sfruttandone al meglio le potenzialità. In
maniera del tutto analoga, un hardware poco efficiente
può penalizzare le prestazioni di un sistema a prescinde-
re dalla bontà del software sviluppato.
Da parecchi decenni la struttura di un tradizionale siste-
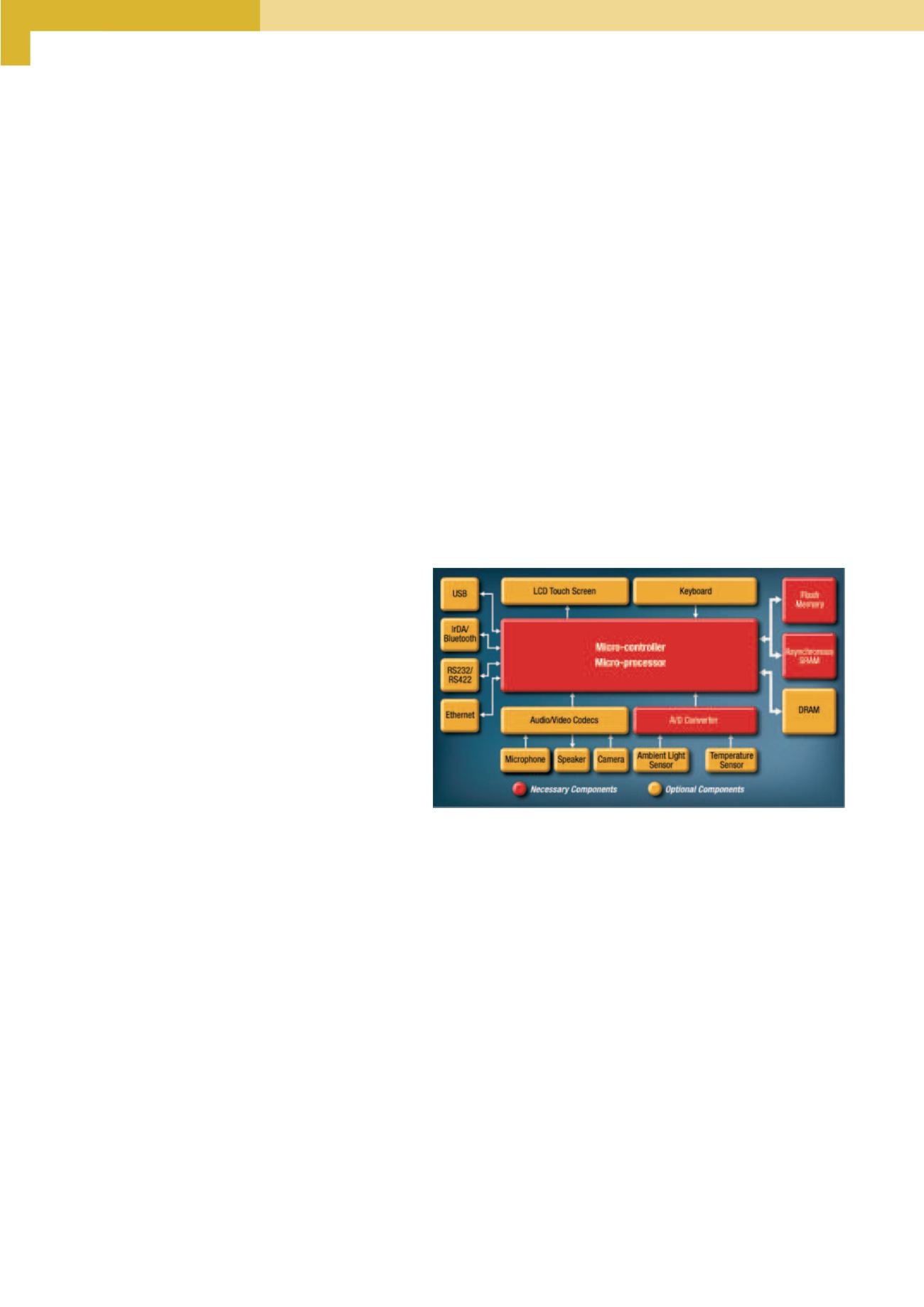
ma embedded non ha subito modifiche. Nella figura 1 è
riportato lo schema a blocchi di un tipico sistema embed-
ded. Il nucleo centrale del sistema è rappresentato da
un microcontrollore o un microprocessore e i progettisti
possono aggiungere o togliere interfacce e periferiche
in base alle necessità. Nel caso la memoria interna del
controllore non sia sufficiente, si ricorre a memorie esterne
come ad esempio flash, SRAM e DRAM.
Prestazioni e budget di potenza sono sempre stati due dei cri-
teri che determinano la scelta dei componenti del sistema, sia
esso il controllore o una qualsiasi delle periferiche. Di conse-
guenza i sistemi embedded si possono classificare nelle se-
guenti tre categorie:
1.
Sistemi “Always ON” (sempre attivi): in questo caso la po-
tenza deve essere fornita da una sorgente continua. Si tratta
di sistemi ad alte prestazioni progettati per funzionare alle più
elevate frequenze operative.
2.
Sistemi alimentati a batteria: una batteria presente a bordo
è la sola sorgente di potenza (come ad esempio nel caso di un
telefono mobile). Anche se le prestazioni sono un parametro
importante, in questo caso la priorità è la durata della batteria.
3.
Sistemi con batteria di back-up (battery backed): questi
sistemi devono essere in grado di funzionare in maniera af-
fidabile anche se viene a mancare l’alimentazione on-board.
Per evitare la perdita di dati critici, i progettisti di sistemi pre-
vedono una piccolo batteria (solitamente del tipo a a bottone
da 240 mAh) per garantire il back-up di funzioni critiche come
la conservazione dei dati nella SRAM e il funzionamento del-
l’RTC (Real Time Un sistema con batteria di back-up sfrutta
l’alimentatore disponibile in condizioni operative normali. In
funzione della mappatura della memoria, esso può eseguire
il codice contenuto nella flash e memorizzare i risultati nella
SRAM. Un aspetto critico è la memorizzazione di questi dati
quando si verificano cadute di alimentazione. La memoria
SRAM è collegata a una batteria alternative presente a bor-
do. Durante il funzionamento normale, l’alimentatore a bordo
fornisce potenza al sistema, mentre quando viene a mancare
l’alimentazione un chip di supervisione commuterà l’alimenta-
zione della SRAM sulla batteria a bordo della scheda ponen-
dola in modalità stand-by.
In un sistema con batteria di back-up, un tipico modello di uti-
lizzo della potenza è riportato in figura 2. Il chip di supervisione
Utilizzo di SRAM veloci
per progetti con memorie
dotate di batterie di back-up
Vinay Manikkoth
Nilesh Badodekar
Cypress Semiconductor
Il basso assorbimento di corrente in modalità “deep
sleep” delle SRAM veloci a basso consumo ne fanno
la soluzione ideale per applicazioni che ricorrono a
una batteria di back up in presenza
di cadute di alimentazione
Fig. 1 – Schema a blocchi di un tipico sistema embedded