


















 49 / 102
49 / 102

DIGITAL
AUTOMOTIVE
49
- ELETTRONICA OGGI 447 - LUGLIO/AGOSTO 2015
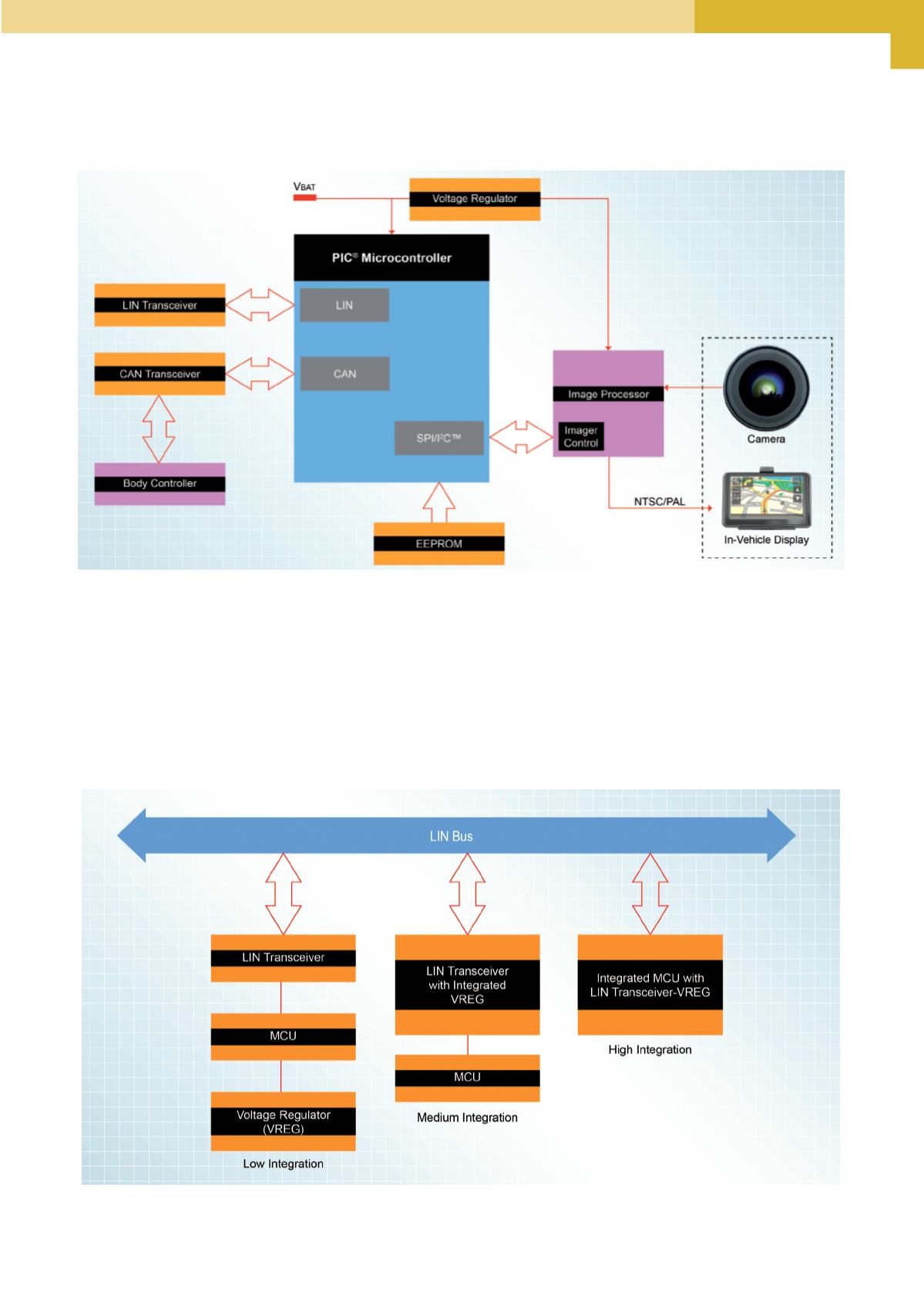
lizzazione (Fig. 2) I microcontrollori possono essere utilizzati
per i bus Can e Lin. Il bus Can può essere reso deterministi-
co e fault-tolerant e messo nelle condizioni di trasferire i dati
a una velocità massima di 1Mbit/s. Per esempio, Microchip
offre una linea completa di prodotti per applicazioni Can em-
bedded, che comprende tra gli altri controllori standalone,
transceiver, microcontrollori a 8 o 16-bit e digital signal con-
troller con controllore Can integrato. Il bus Lin (fig. 3) può
essere implementato su qualsiasi microcontroller PIC con
una interfaccia Usart.
L’azienda mette anche a disposizione una “robusta” interfac-
cia per il livello fisico, l’implementazione del DLL (Data Link
Layer - Livello di Collegamento Dati), driver conformi alle
specifiche del bus Lin e tool di ausilio per lo sviluppo tra cui
un progetto di riferimento Lin.
Questi microcontrollori possono anche essere utilizzati per
Fig. 2 – Sistema di visione basato sullo uso di telecamere
Fig. 3 – Modalità di utilizzo di un microcontrollore per implementare il bus Lin