

















 64 / 102
64 / 102

COMPONENTS
SENSORI
64
- ELETTRONICA OGGI 444 - APRILE 2015
bile ottimizzare le prestazioni di un dato
sistema salvando i relativi parametri di
calibrazione nella memoria EEPROM in-
tegrata. Per la programmazione dei sen-
sori della famiglia HAL 37xy non sono
necessari pin aggiuntivi, in quanto la
comunicazione con il sensore avviene
tramite modulazione della tensione
sul
pin di uscita.
Soluzioni di misura con
il principio 3D HAL
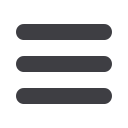
Misura di posizioni angolari
I sensori della famiglia HAL 37xy sono
idonei per la misura di posizioni angola-
ri entro un intero angolo giro. Il sensore
può operare sia all’estremità sia sul lato
dell’asse di rotazione (Fig. 2). Una rotazio-
ne di 360 gradi corrisponde a un segnale
seno e coseno per le componenti “Bx e By”
o “Bx e Bz” (Fig. 3). Utilizzando il processo-
re di segnale digitale (DSP) integrato nel
sensore, l’angolo può essere determinato
mediante il calcolo dell’arcotangente del
rapporto delle due componenti. L’uscita
del sensore è direttamente proporzionale
all’angolo misurato.
Il principio 3D HAL offre i seguenti vantaggi:
• misura effettiva di un angolo di 360° con
un singolo circuito integrato ;
• precisione superiore a ±1,5° su tutta la gamma di tem-
perature;
• possibilità di realizzare soluzioni multigiro;
• assenza di campi magnetici di disturbo causati da con-
centratori di flusso;
• eccellente comportamento lineare sull’intera gamma di
campo magnetico;
• immunità alle variazioni di tra-
ferro.
I sensori operano in modo affi-
dabile e preciso nell’intervallo
di temperatura di giunzione (TJ)
da -40 °C a 170 °C, facilitando
la calibrazione del sistema
o
rendendola
addirittura
ridondante. Esempi di configu-
razione del magnete per la mi-
sura di posizioni angolari sono
riportati in tabella 1.
Misura di posizioni lineari
Il principio della determinazione della
posizione lineare mediante i sensori
Micronas 3D HAL si basa su una misu-
ra bidimensionale del campo magneti-
co tramite un elemento convenzionale
Hall e il corrispondente elemento Hall
verticale (Fig. 4).
e si misura un campo magnetico diso-
mogeneo, lo sfasamento dei segnali
emessi dagli elementi Hall non è esat-
tamente di novanta gradi e la deforma-
zione dei segnali seno e coseno genera
una caratteristica di uscita non propri-
amente lineare.
Tuttavia i sensori sono calibrabili su 33
punti e un algoritmo di linearizzazione
consente di compensare la non linea-
rità del campo in ingresso, permetten-
do di ottenere un’elevata precisione
dell’ordine di 1.5% su distanze fino a
40 mm (Fig. 5).
Esempi di configurazione del magnete
per la misura di posizioni lineari sono
riportati in tabella 2.
Rispetto ai sensori a effetto Hall con-
venzionali la nuova generazione 3D
HAL Micronas offre i seguenti vantaggi:
• elevato grado d’immunità alle variazioni di temperatura
e altri fattori ambientali;
• ridotta sensibilità alle variazioni di traferro;
• riduzione delle dimensioni dei magneti fino a un 40%, a
parità di prestazioni;
• migliori prestazioni, a parità di dimensioni del magnete;
• misure di posizione su distanze più elevate.
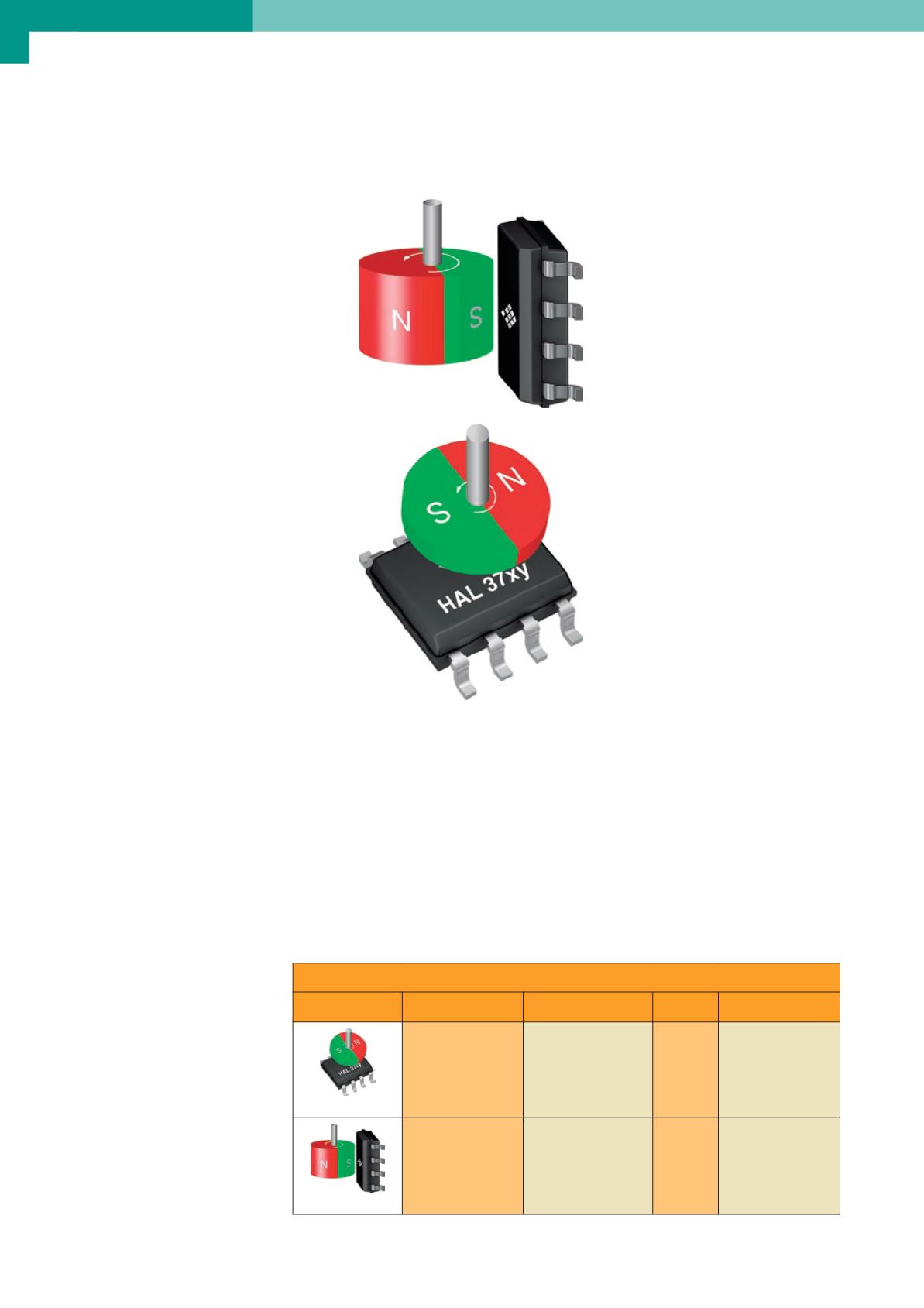
Tabella 1–Esempi di configurazionedelmagneteper lamisuradi posizioni angolari
Configurazione
Materiale
Dimensioni
Air gap Range di misura
SmCo/NeFeB/Alnico D 10 mm/T 2.5 mm 4 mm
360°
SmCo/NeFeB/Alnico
D 15 mm/T 6 mm 2.5 mm
360°
Fig. 2 – Posizionamento del sensore Hall
3D all’estremità o accanto a un asse di
rotazione per misure di angoli di rotazione
fino a 360°