


















 93 / 104
93 / 104

POWER 6 - NOVEMBRE/DICEMBRE 2014
XVII
INTELLIGENT CONTROL
condizione di alimentazione. Ad esempio l’alimentatore
potrebbe essere configurato per operare come control-
lore isteretico con un semplice regolatore feed-forward
implementato in firmware quando un dispositivo si trova
in modalità standby; nel momento in cui il dispositivo in
questione richiede una maggiore potenza, l’alimentatore
può essere riconfigurato in tempi brevi per operare in
modalità CCM (Continuous Current Mode) a una diffe-
rente frequenza di funzionamento
Poiché il controllo dell’alimentazione è completamente
integrato nella MCU, non sono richiesti ulteriori compo-
nenti da aggiungere nel corso dello sviluppo: ciò permet-
te di semplificare la progettazione e di ridurre il numero
totale di componenti. Inoltre, poiché la soluzione è com-
pletamente integrata, il firmware ha la totale visibilità dei
parametri di alimentazione senza modificare significati-
vamente il processo di progettazione mentre l’interfaccia
di comunicazione e l’”intelligenza”
possono essere sviluppate e verifica-
te dal team che si occupa del siste-
ma di alimentazione.
Un tipico alimentatore basato su
PIC16F753 è mostrato in figura 1;
la maggior parte delle implemen-
tazioni sono derivate da modifiche
minime di una unica configurazio-
ne SMPS. Il generatore COG (Com-
plementary Output Generator)
produce un’uscita complementare
con una deadband programma-
bile a partire dai fronti di salita e
di discesa degli ingressi, mentre il
CCP è configurato per produrre un
fronte di salita della frequenza programmabile. Il com-
paratore, C1, produce un fronte di discesa quando la
corrente supera l’uscita del circuito per la compensazio-
ne della pendenza CCP e C1 possono essere combinati
per generare il massimo duty cycle, richiesto da alcune
topologie come boost, flyback e SEPIC. L’amplificatore
operazionale, OPA, viene utilizzato per fornire feedback
e compensazione, mentre il DAC viene usato per fornire
il riferimento dell’Op Amp (non caso non siano richiesti
livelli programmabili è possibile ricorrere all’FVR - Fixed
Voltage Reference). Il compensatore di pendenza può
essere resettato dal comparatore o dal COG, e sfrutta un
assorbimento di corrente (current sink) programmabile
per scaricare un condensatore caricato in precedenza
(in questo caso, il livello di carica è impostato dall’ampli-
ficatore OPA).
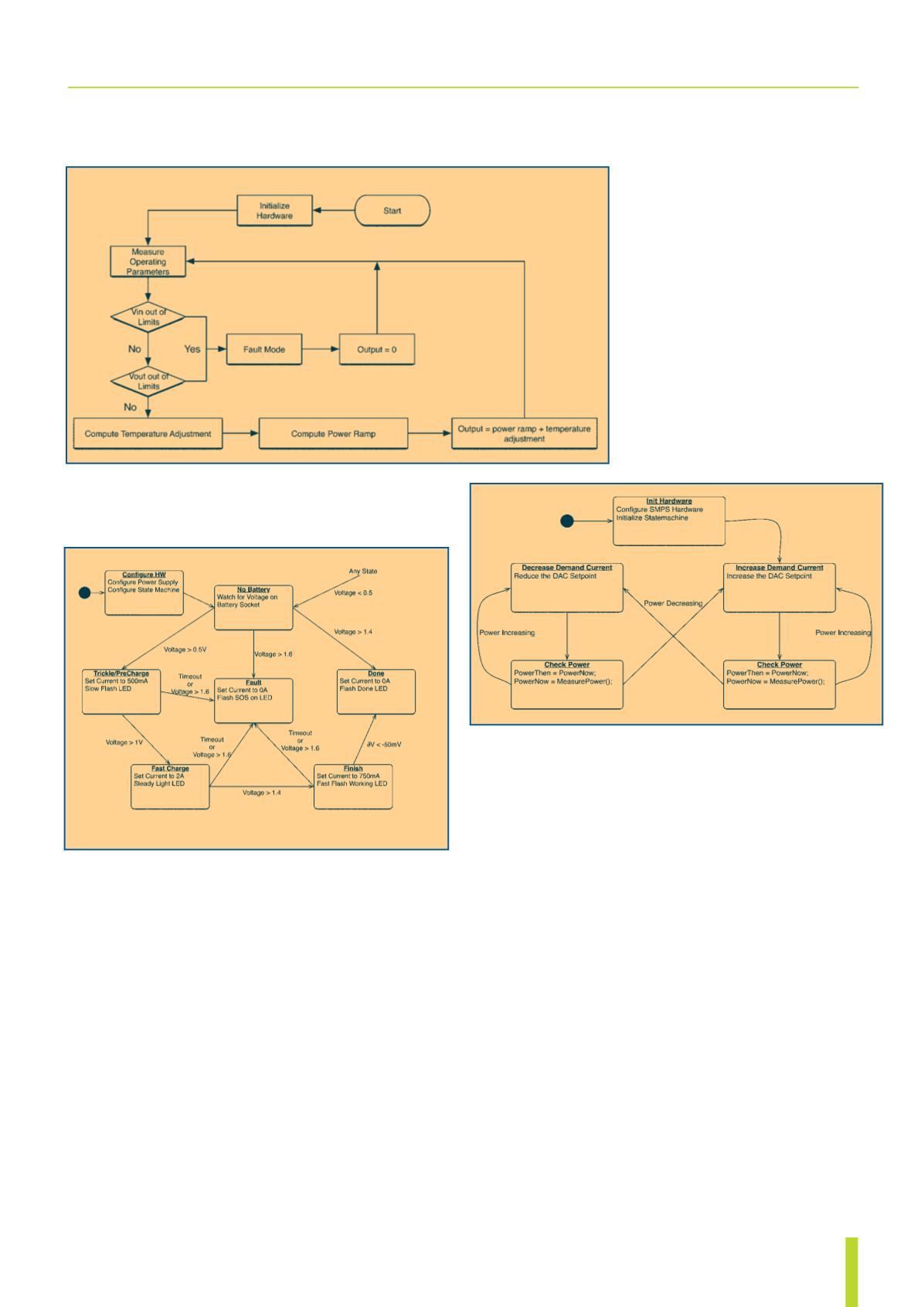
Si tratta di una configurazione particolarmente semplice
e nella figura 2 è riportato un esempio di funzionamento
come alimentatore boost di regolazione della corrente
in una stringa di LED. Una volta realizzato è collaudato
l’hardware, è possibile aggiungere un certo grado di “in-
telligenza” semplicemente implementando le funzioni
base, come riportato negli esempi di figura 3.
Fig. 3 – a) Schema a Áusso di un driver per LED b)
Macchina a stati per il rilevamento della potenza
massima c) Macchina a stati per un carica-batterie
(a)
(b)
(c)