


















 92 / 104
92 / 104

POWER 6 - NOVEMBRE/DICEMBRE 2014
XVI
Power
sione, la corrente e la temperatura. Il controllo di altri pa-
rametri, come ad esempio il duty cycle o la frequenza di
alimentazione, consentirebbe un controllo più sofisticato
di caratteristiche specifiche, come ad esempio i livelli di
tensione.
Esistono diversi ASSP per alimentatori a commutazione
(SMPS - Switched Mode Power Supply) che offrono un
metodo per modificare le proprie funzionalità sulla base
di decisioni prese in base alla misura di parametri criti-
ci. Essi permettono di incrementare l’efficienza in modo
semplice e possono essere gestiti da una vasta gamma di
microcontrollori; le interfacce seriali consentono a una
MCU di modificare la funzionalità di un alimentatore alla
base dei parametri rilevati.
Un ulteriore vantaggio di questo approccio è che l’ali-
mentazione resta sotto il controllo dell’ ASSP, per cui il
team di progetto non deve avere conoscenza specifica sul
design degli alimentatori, ma solamente conoscere i pa-
rametri disponibili per la modifica e i loro effetti la teoria
del controllo chiave rimane un dominio dei progettisti
dell’SMPS.
Il passo successivo, che ha riflessi favorevoli in termini di
costi, è l’integrazione delle funzionalità dell’ASP e del-
la MCU in un singolo dispositivo. Ciò è possibile per le
MCU ad alte prestazioni, che operano in sinergia con
un convertitore A/D a campionamento rapido . Questo
approccio richiede competenze più approfondite nella
progettazione di SMPS, e le prestazioni saranno commi-
surate alle risorse di calcolo che la MCU può mettere a
disposizione.
Un approccio ibrido
La via di mezzo tra questi due approcci è quello ibrido. In
questo caso è possibile ricorrere a un controllore a segna-
li misti che integra le necessarie periferiche analogiche,
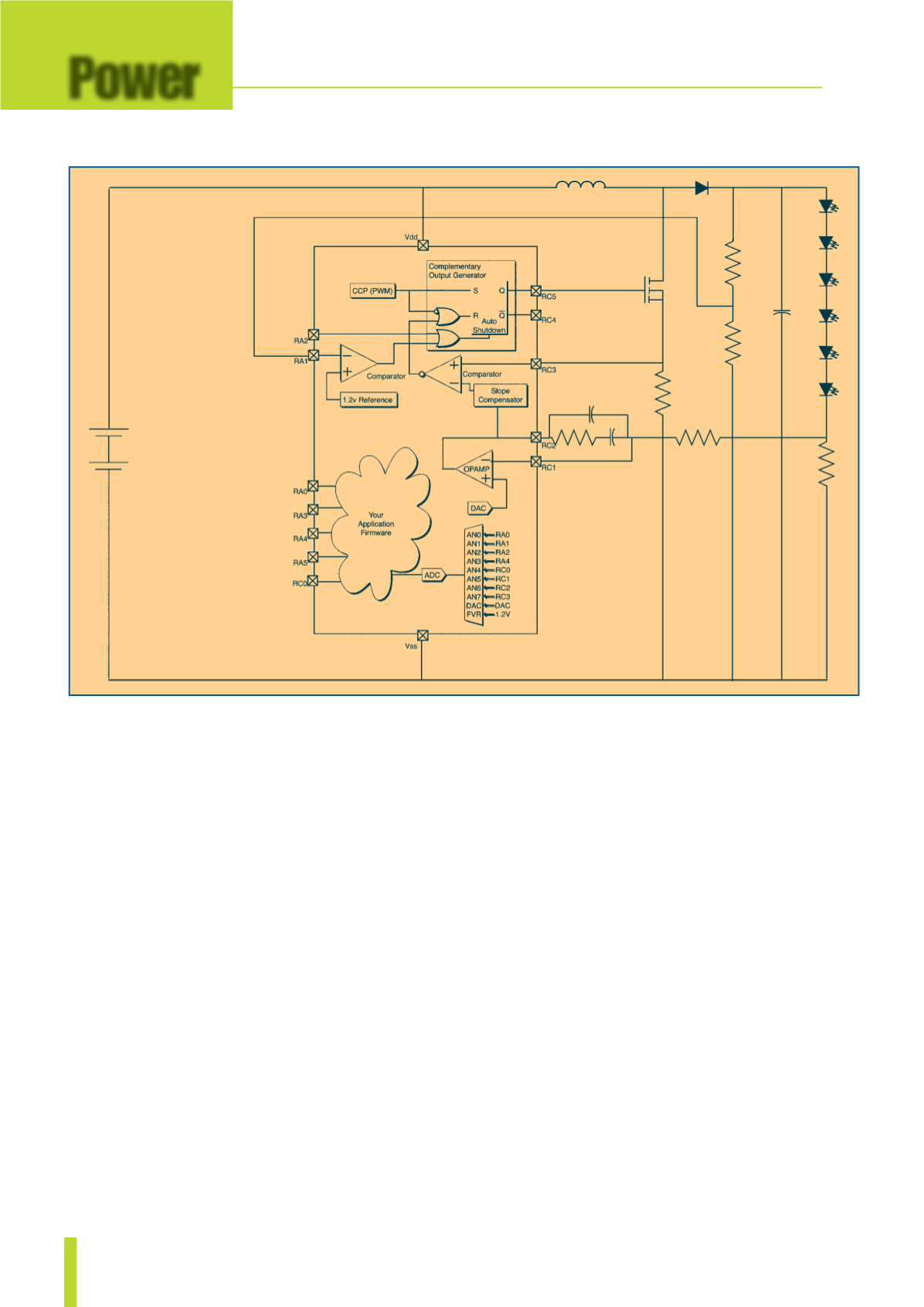
come ad esempio il dispositivo PIC16F753. Esso include
un amplificatore operazionale, un circuito per la com-
pensazione della pendenza, un convertitore D/A, com-
paratori e controllore PWM in una singola MCU a 14pin.
Ognuna delle periferiche è programmabile, dando così
la possibilità di combinarle in vari modi per creare un
gran numero di alimentatori current mode. Grazie al
controllo via software, la configurazione è dinamica,
consentendo un rapido adattamento alle variazioni delle
Fig. 2 – Esempio di alimentatore di tipo “boost” per regolare la corrente in una stringa di LED