


















 67 / 104
67 / 104

EDA/SW/T&M
RADAR
67
- ELETTRONICA OGGI 441 - NOVEMBRE/DICEMBRE 2014
tro i paraurti anteriori dell’auto è forzatamente
limitato e perciò bisogna farli estremamente
compatti. Tuttavia, in confronto ad altre appli-
cazioni automotive come le video camere e i
sensori a ultrasuoni il radar ha il vantaggio di
non aver bisogno di contatto visivo fra i sensori
e gli oggetti da rilevare e ciò costituisce un buon
vantaggio soprattutto perché consente di posizionare i sensori
nei punti vicini ai paraurti più adattabili con il disegno dell’auto-
mobile. L’unico vincolo da considerare consiste nel fare in modo
che oltre i sensori vi sia solo plastica perché se ci sono parti
metalliche occorre compensarne la relativa attenuazione che si
aggiunge nella trasmissione e nella ricezione dei segnali. Questa
fase è indispensabile per calibrare le prestazioni del radar.
Per le applicazioni automotive ci sono attualmente a disposizio-
ne dei costruttori quattro bande di frequenza centrate a 24 e a
77 GHz, tutte con diversa ampiezza di banda. La banda ISM a
24 GHz ha un’ampiezza di banda massima di 250 MHz mentre
sempre a 24 GHz la banda UWB (UltraWideBand) ha un’ampiez-
za di banda di 5 GHz. Secondo le direttive internazionali che le
governano queste due tecnologie saranno in vigore fino al 2022
perché dopo tale anno tutte le bande di frequenza che richiedo-
no un’ampiezza di banda oltre 4 GHz dovranno per forza esse-
re spostate nell’intervallo fra 77 e 81 GHz. A tal proposito è già
in corso qualche sperimentazione. Ad ogni modo, l’ampiezza di
banda dei segnali ne determina anche la dinamica e la risoluzio-
ne e perciò può influire sensibilmente sulle prestazioni dei radar.
Inoltre, le altre frequenze adatte per i radar che sono allocate a
122 e a 244 GHz con ampiezza di banda di 1 GHz non sono ot-
timizzate per le applicazioni automotive e resteranno quindi in
uso negli altri ambiti applicativi dei radar oppure per eventuali
progetti di ricerca e sperimentazione.
Grazie ai segnali radar gli sviluppatori possono realizzare sistemi
capaci di rilevare contemporaneamente la distanza e la velocità
di molti oggetti con una singola scansione. Tuttavia, i sistemi ra-
dar con impulsi standard non sono in
grado di gestire una funzionalità così
avanzata perché si limitano a misurare
gli intervalli di tempo che trascorrono
fra gli impulsi trasmessi e quelli rice-
vuti e in questo modo possono rilevare
solamente la distanza mentre invece
per determinare la velocità bisogna
per forza usare dei segnali modulati in
frequenza come ad esempio le onde
continue Linear Frequency-Modulated
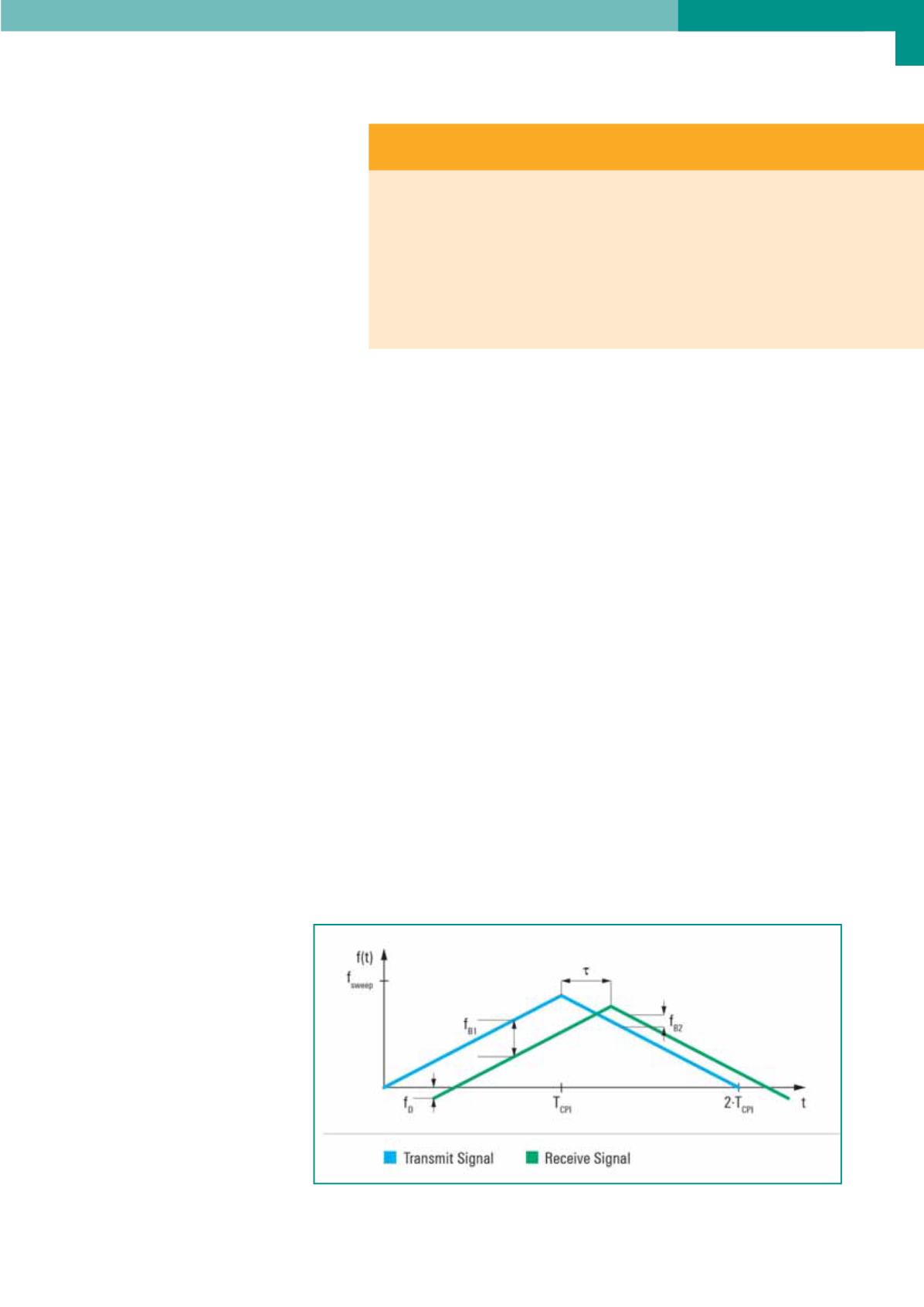
Continuous-Wave (LFMCW). L’offset di
frequenza fra il segnale ricevuto e il
segnale trasmesso è noto anche come
Beat Frequency (battimento) e ha una
componente Doppler fD e una componente di ritardo fT. In prati-
ca, la prima contiene le informazioni sulla velocità e la seconda
le informazioni sulla distanza. Nel sistema in figura ci sono due
equazioni che riportano altrettante misure del battimento con le
due incognite che sono la distanza R e la velocità vr. Per ottenere
dei risultati precisi si fanno almeno due misure con frequenza
leggermente diversa ma se ci sono molti oggetti da rilevare c’è
il rischio di non saper più riconoscere i battimenti dei diversi
oggetti perché le differenze di frequenza dette “chirp” sono così
vicine in valore e così rapide nel tempo che quando sono troppo
numerose finiscono con il generare delle sovrapposizioni casua-
li dette “ghost target” o oggetti fantasma perché non corrispon-
dono ad alcun oggetto reale. Questo problema si può risolvere
utilizzando più segnali a diversa frequenza in modo da rilevare
chirp differenti per ciascun oggetto anche se così si aumenta
pure il tempo necessario per le misure radar.
Il rilevamento di entrambe le incognite con un solo ciclo di misu-
ra è possibile solo utilizzando sequenze di chirp FM (Frequency
Modulation, o modulati in frequenza). In pratica, i chirp hanno
valori molto piccoli rispetto all’intera misura e perciò il battimen-
to viene determinato principalmente dalla componente di ritar-
do fT. Di conseguenza, dalla misura dei chirp si ricava innanzi
tutto il valore della distanza senza considerare la componente
Doppler. Poi si determina la differenza di fase osservabile in una
sequenza di molti chirp successivi e quindi si ricava la compo-
nente Doppler con una semplice trasformata di Fourier che con-
sente di ottenere il valore della velocità degli oggetti. In questo
modo la risoluzione sulla velocità degli oggetti migliora se si dà
C
ARATTERISTICHE DEGLI ANALIZZATORI DI SPETTRO
R&S FSW:
• Range di frequenza da 2 Hz fino a 8/13,6/26,5/43,5/50/67 GHz; espandibile a 500 GHz.
• Frequenza Intermedia (IF) da 1310 a 1530MHz (dipende dall’ampiezza di banda).
• Ampiezza di banda per l’analisi dei segnali fino a 500MHz.
• Basso rumore di fase di -137 dBc (a 1 Hz) con 10 kHz di offset (su portante di 1 GHz).
• Analisi di compatibilità sugli standard di comunicazione digitali wireless come LTE
e Ieee 802.11p (car-to-car).
• Processi di misuramultipli eseguibili in parallelo.
• Touch-screen di 12,2” (31 cm) ad alta risoluzione.
Fig. 2 – Le componenti di un segnale radar LFMCW