POWER 3 - novembre/dicembre 2013
XXIII
ANALOG DC/DC CONTROLLER
soluzione digitale offre una valida soluzione. La tecnica
più comune utilizzata per realizzare questa ottimizzazione
prevede l’analisi e il controllo delle condizioni esterne del
convertitore fino quando diventano stabili. Non appena
viene rilevato un funzionamento in regime stazionario,
viene modificato il tempo morto e viene controllato il
fattore di funzionamento dello switch high-side. La teo-
ria alla base di questa tecnica per convertitori a tensione
costante prevede che in condizioni di stabilità, il tempo di
commutazione più breve dello switch high-side determi-
na il punto di massima efficienza.
In questo punto infatti viene pre-
levata dal bus la quantità minima
di potenza necessaria per fornire,
in uscita, un determinato livello di
potenza costante (Fig. 2).
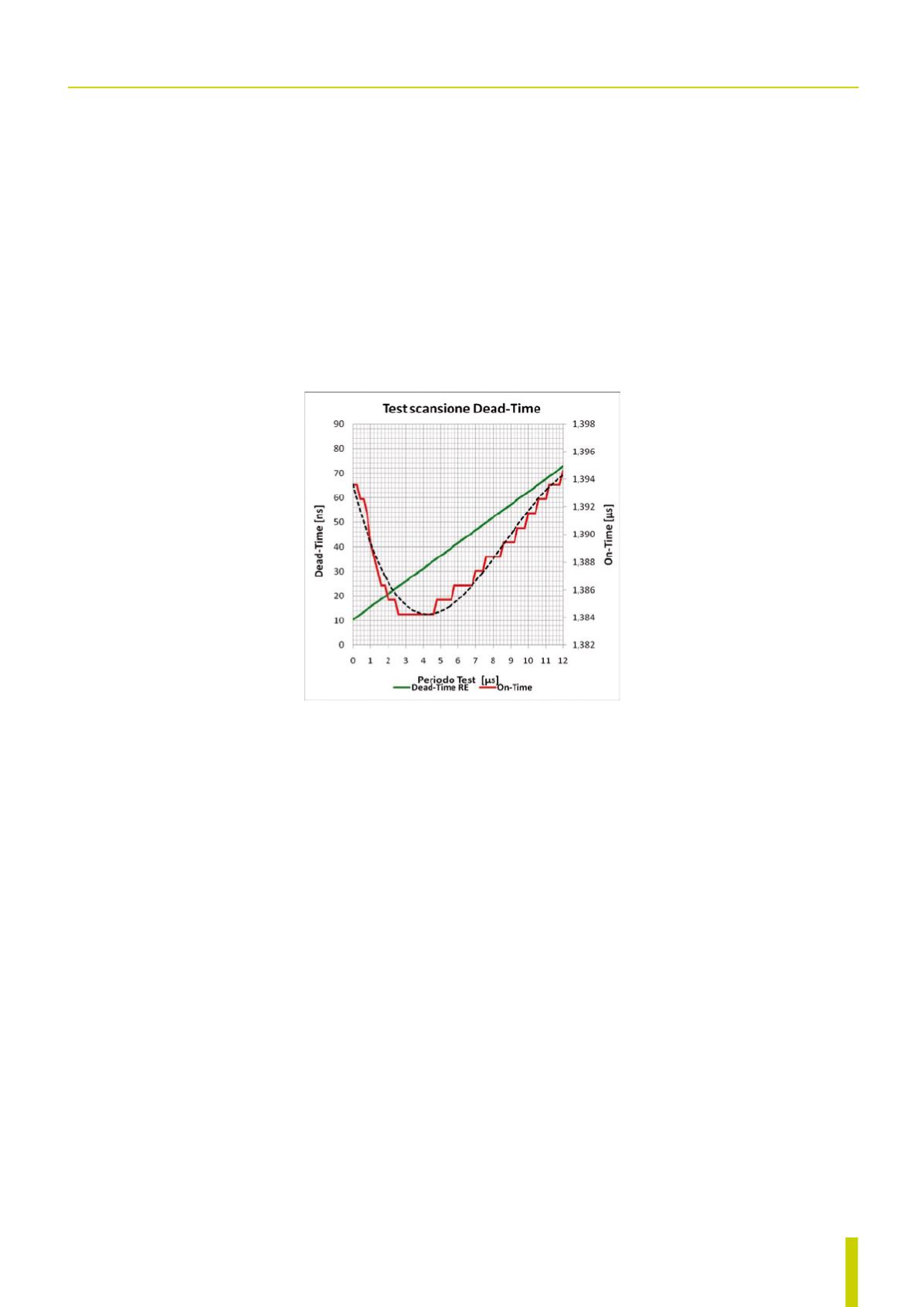
La figura 3 mostra i risultati di una
singola scansione su un range de-
finito di impostazioni di dead-time
durante il funzionamento a regi-
me, misurata su un banco di prova.
La linea verde indica il dead-time
applicato al fronte di salita dello
switch high-side (DTR). La curva
rossa dà lo sviluppo del tempo di
conduzione dello switch high-side
in funzione di vari valori di dead-
time; la linea nera punteggiata mo-
stra la sua approssimazione di 3
o
ordine.
L’intervallo dato per la scansione
del dead-time è stato determinato
caratterizzando il sistema e definendo uno scenario best-
case (dead-time più breve) e un scenario worst-case (dead-
time più lungo). La scansione è stata effettuata con la riso-
luzione massima di 4ns al 90% del carico (Vin = 12V, Vout
= 3.3V, Ia = 9A). Sul lato sinistro del grafico, il duty-cycle
parte con valori di circa 1,394 msec e scende rapidamente
non appena viene aumentato il dead-time. In questa zona
gli switch high- e low-side già mostrano una certa sovrap-
posizione e una parte della potenza prelevata dall’ingres-
so viene direttamente cortocircuitata a terra.
A dead-time intorno ai 25 ns, il tempo di conduzione rag-
giunge il suo minimo di 1,384 msec e ricomincia a salire
quando il tempo morto viene ulteriormente aumentato.
In un progetto non regolabile, per gli switch utilizzati il
dead-time sarebbe stato predisposto ad almeno 70 ns; per-
tanto, in queste condizioni operative, il tempo di condu-
zione tipico sarebbe stato di 1,395 µsec. In accordo all’e-
quazione III della figura 2, la differenza tra il tempo di
conduzione high-side originale e quello ottimizzato vale
11 ns. A prima vista, questo non è un risultato accettabile,
ma in questo convertitore ad alta frequenza ciò significa
un aumento circa dello 0,9% in termini di efficienza, con
un aumento di efficienza totale da circa 92% a 93%.
Frequenza di commutazione regolabile
e rete di compensazione
Un’ulteriore caratteristica molto interessante è la possibi-
lità di regolare a livello software sia la rete di compensa-
zione sia la frequenza di commutazione. Questo non solo
permette di facilitare la regolazione di base durante la
configurazione d’installazione, ma
permette anche di effettuare ulte-
riori regolazioni durante il funzio-
namento. Tale possibilità, finora,
è stato un dominio inviolabile dei
controller completamente digitali.
Nelle topologie hard-switching -
quali convertitori buck sincroni - le
perdite di commutazione sono re-
sponsabili della maggior parte del-
le perdite di potenza. Specialmen-
te con carichi leggeri, la riduzione
della frequenza di commutazione
può contribuire in modo significa-
tivo a migliorare l’efficienza com-
plessiva del convertitore. Tuttavia,
quando la frequenza di commu-
tazione viene ridotta - e la rete di
compensazione è fissa a livello
hardware - i guadagni cominciano
normalmente a ridursi e ciò po-
trebbe comportare una riduzione
dei margini di guadagno e di fase. Per compensare questo
effetto, è necessario effettuare una regolazione dei guada-
gni del sistema. L’MCP19111 offre dei registri per regola-
re la tensione di rampa del generatore PWM, la frequenza
di zero (frequenza di risonanza all’origine, definendo il
primo polo), il guadagno totale e la pendenza del guada-
gno nonché la pendenza stessa. Inoltre sono disponibili
dei set di registri per regolare l’offset dell’amplificatore e
la sensibilità del rilevamento di corrente. Sebbene questa
tecnica possa richiedere un processo di ampia caratteriz-
zazione del sistema, essa offre l’opportunità di migliorare
significativamente efficienza e stabilità.
Ottimizzazione dei carichi ridotti
Nei convertitori buck asincroni le perdite di potenza nel
diodo di ricircolo sono determinate dalle caduta di tensio-
ne diretta rispetto alla corrente. Poiché sul diodo è pre-
sente in modo permanente una caduta di tensione diretta
significativa che non può essere minimizzata, per bypas-
sare/sostituire il diodo formando eventualmente un rad-
Fig. 3 - Risultati della misura su una scan-
sione rispetto a vari valori di dead-time
durante lo stato di funzionamento stabile


