POWER 3 - novembre/dicembre 2013
XXII
Power
Potenziamenti digitali
Disporre sullo stesso die di un controllore digitale e
di un regolatore switching analogico permette di svi-
luppare funzioni analogiche strettamente integrate
con il controllo numerico. Ciò mette a disposizione
l’opportunità di gestire direttamente, e in fase di
funzionamento, il circuito di compensazione, la fre-
quenza di commutazione, il controllo del dead-time,
il livello delle soglie di sistema e molto altro ancora.
Inoltre, poiché l’MCU è incapsulato nell’architettura
del regolatore switching analogico, è possibile evita-
re il ricorso ad alimentatori ausiliari o a driver MO-
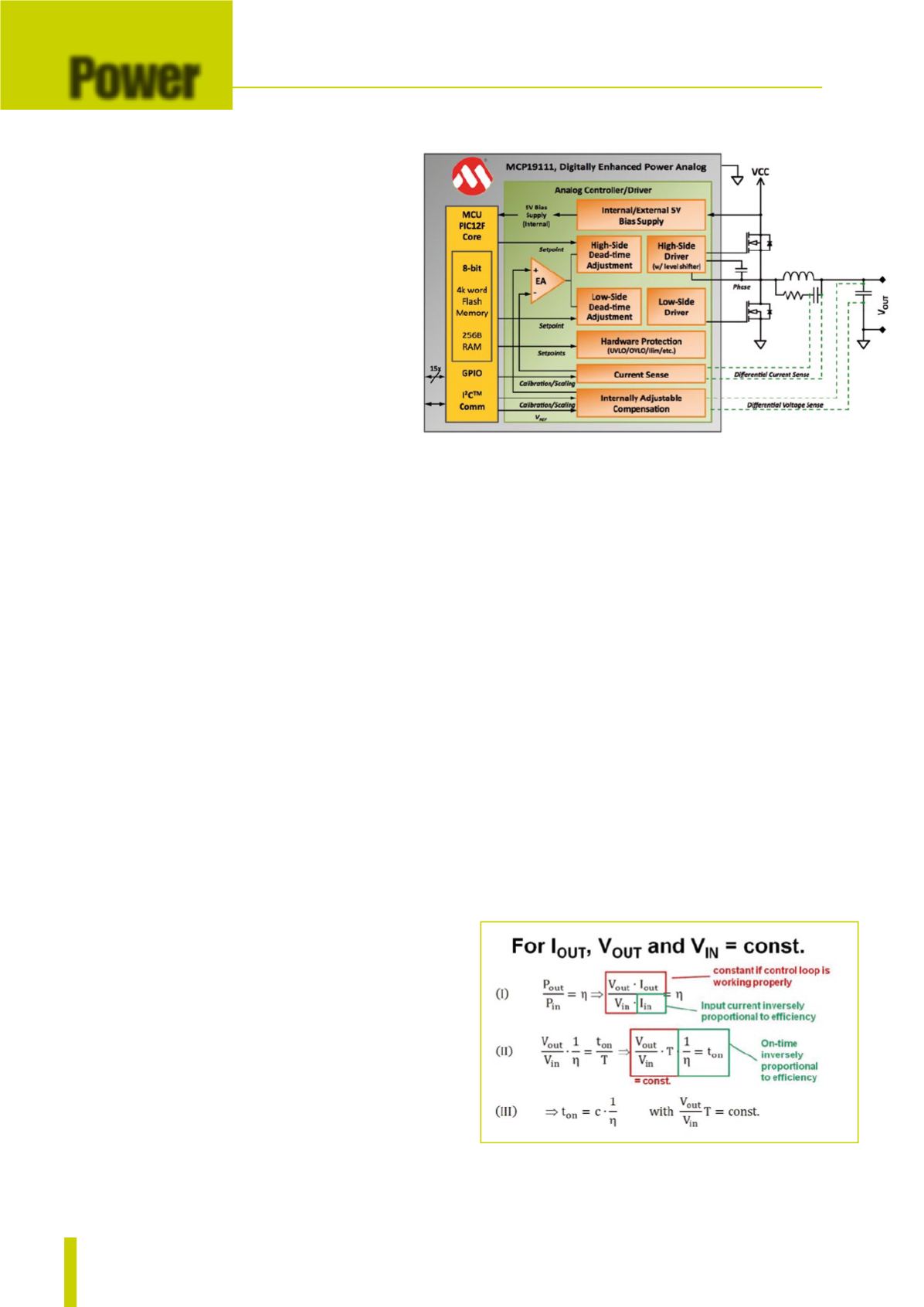
SFET esterni. La figura 1 mostra uno schema a bloc-
chi del Digitally Enhanced Power Analog Controller
MCP19111, insieme a un tipico circuito applicativo.
La sezione del regolatore switching analogico copre
interamente tutti i componenti del loop di controllo ana-
logico (compresi i driver MOSFET) e contiene anche l’a-
limentazione ausiliaria per l’MCU. La sezione digitale è
costituita da un core MCU mid-range a 8 bit PIC12F con
8 KB di Flash e 256 byte di RAM. A questo si aggiungono
fino a 15 GPIO (di cui otto sono ingressi analogici aggiun-
tivi), una interfaccia di comunicazione seriale basata su
I² C/SMbus, interrupt esterni e tre timer. Molti segnali
interni - come la tensione di ingresso, la tensione di usci-
ta o la corrente di induttore - possono essere monitorati
direttamente on-chip senza bisogno di rilevatori esterni.
L’implementazione digitale permette anche la lettura del
fattore di utilizzazione della corrente: questa caratteristica
è molto utile e sino ad ora, per molte ragioni tecniche, era
riservata solo ai controller completamente digitali.
Ottimizzare l’efficienza
Oltre alle funzionalità avanzate di monitoraggio, l’in-
tegrazione monolitica di un core digitale offre anche
l’accesso diretto a numerosi parametri che sono normal-
mente determinati a livello hardware o totalmente inac-
cessibili poiché integrati a livello di silicio. Le opportunità
più importanti riguardano la regolazione del dead-time,
la programmazione dei compensatori, la calibrazione dei
feedback interni, la programmabilità delle soglie di prote-
zione e la possibilità di passare dalla modalità di controllo
in corrente a quella in tensione durante il funzionamento.
Regolazione dead-band
Nei convertitori buck sincroni l’impostazione del dead-
time relativo al passaggio tra switch high-side e switch
low-side ha un’influenza significativa sul rendimento
complessivo del sistema. I controller analogici non offro-
no la possibilità di impostare il dead-time. Il progettista
deve fare riferimento al caso peggiore, considerando le
temperature e le condizioni di carico più critiche, dove il
dead-time di solito deve essere massimo. A questo punto
deve “programmare” tale valore a livello hardware, inse-
rendo - per esempio - condensatori o resistenze. Ciò com-
porta inevitabilmente un aumento delle perdite a livello
del nucleo e di diodi, anche se il convertitore non sarà
probabilmente mai esposto a queste condizioni estreme.
Una corretta soluzione è quella di adattare automatica-
mente il dead-time alle condizioni di carico e di tempe-
ratura. Purtroppo, l’uso di un rilevatore zero-crossing
on-board per pilotare gli interruttori con un dead-time
ottimale, comporta alcune gravi limitazioni. Questo per
due motivi. Primo, tutti i tipi di rivelatori analogici di zero
crossing sono basati su comparatori. I comparatori ana-
logici più veloci (verosimilmente accessibili) hanno dei
ritardi tipici di propagazione di 15-20 ns, un valore (dati i
risultati mostrati in Fig. 3) troppo basso per raggiungere
un livello ottimale. Secondo, il rivelatore di zero-crossing
dovrebbe operare nel nodo di commutazione del mezzo
ponte, dove il rumore di commutazione ad alta frequenza
richiederebbe dei filtri che rallenterebbero ancor più la
commutazione, rendendo così questa circuiteria inutile.
Tuttavia, laddove una soluzione analogico non arriva, una
Fig. 1 - Schema a blocchi applicativo di MCP19111
Fig. 2 - Equazione della tecnica base ADTA (Auto-
mated Dead-Time Adjustment)


