20
- ELETTRONICA OGGI 432 - NOVEMBRE/DICEMBRE 2013
COVERSTORY
L
e onde di corrente ad alta velocità possono
generare cadute di tensione nel circuito inte-
grato. Oltre un certo valore, queste cadute possono
provocare il reset del microprocessore o genera-
re errori nei risultati della prova. Questo articolo
spiega i motivi per cui si verificano queste cadute
di tensione e offre diversi modi per contenerle al
minimo, attraverso una scelta oculata di alimenta-
tori e conduttori di carico e utilizzando reti locali di
bypass.
Scegliere un alimentatore programmabile
Tradizionalmente, la regolazione ottimale della ten-
sione di uscita si otteneva tramite un alimentatore
di tipo lineare.
A correnti più elevate, tuttavia, gli alimentatori
lineari tendono a diventare ingombranti, costo-
si e altamente inefficienti. Miglioramenti recenti
nella tecnologia degli alimentatori a commutazio-
ne permettono di sostituire gli alimentatori line-
ari con alimentatori a commutazione nelle appli-
cazioni in cui si richiedono prestazioni elevate.
I progettisti di alimentatori a commutazione devono
far fronte ai seguenti obiettivi apparentemente con-
trastanti: un basso rumore in uscita, una rapida ri-
sposta ai transitori, costi bassi e un’elevata densità
di potenza. Il basso rumore di uscita può essere di
solito ottenuto inserendo più stadi di filtraggio o uti-
lizzando filtri con componenti più grandi; entrambi
i sistemi portano tuttavia ad aumentare i costi, ab-
bassare la densità di potenza e rallentare la risposta
ai transitori. Alimentatori più evoluti utilizzano una
frequenza di commutazione più alta, una migliore
progettazione dei filtri e topologie di controllo più
sofisticate al fine di ottimizzare tutti i parametri in-
teressati. Nella scelta di un alimentatore per misure
su circuiti integrati, al fine di garantire buoni risulta-
ti, è importante esaminare i parametri della risposta
transitoria in tensione e la caratteristica dell’impe-
denza di uscita.
Oggi i circuiti integrati sono più veloci che mai. L’aumento della velocità
di funzionamento può portare a una richiesta di potenza estremamente
dinamica al sistema di alimentazione, che può creare qualche problema
in fase di collaudo nel momento in cui si genera potenza tramite un
alimentatore programmabile
Peyman Safa
OTTIMIZZARE LA QUALITÀ
IN PRESENZA DI FORTI
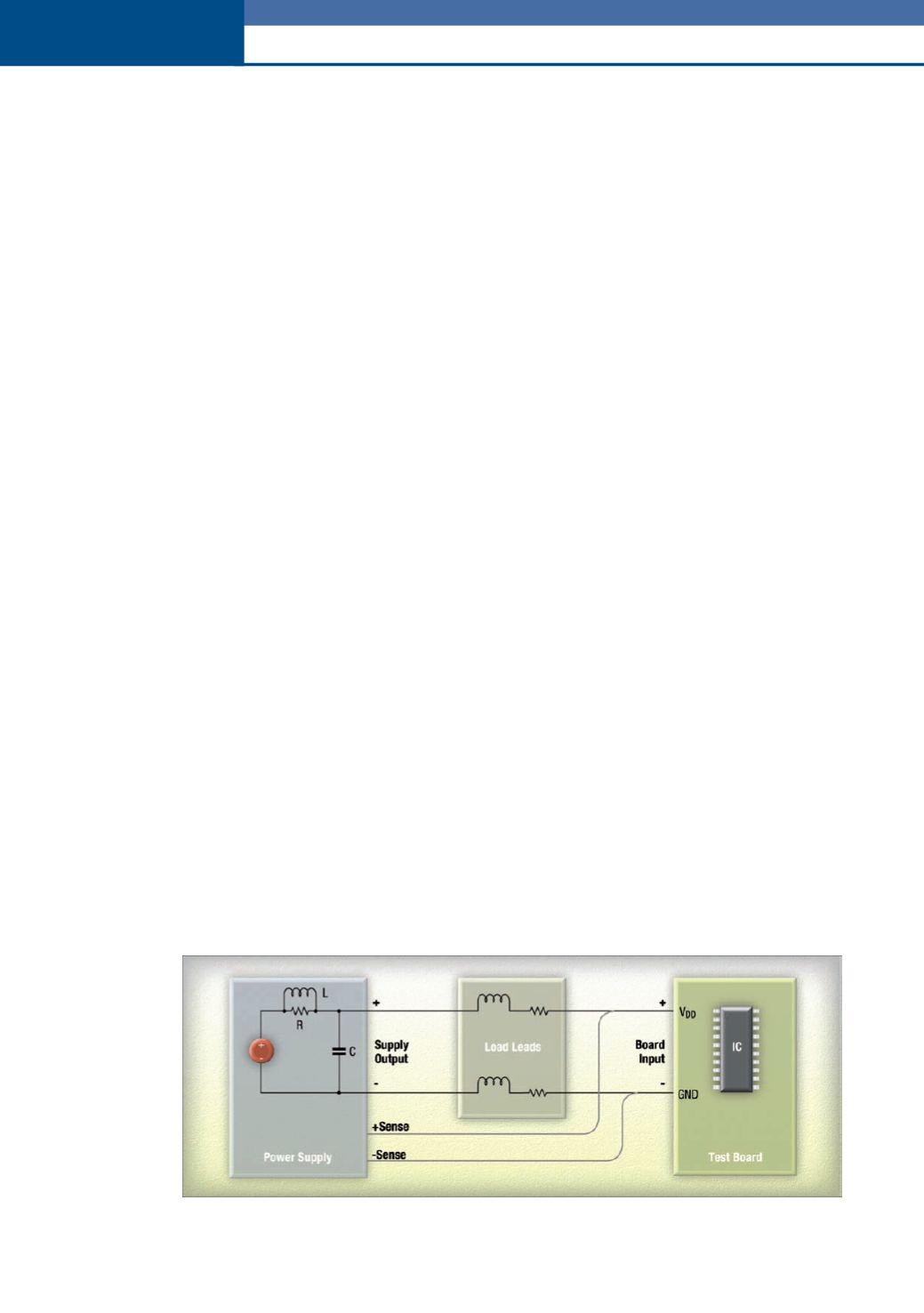
Fig. 1 - Impedenza di uscita dell’alimentatore e impedenza dei conduttori di carico (modello semplificato)


