

















 29 / 92
29 / 92

29
EMBEDDED
66 • NOVEMBRE • 2017
AUTONOMOUS DRIVING |
IN TEMPO REALE
robuste capacità di rilevamento, i radar vengono
utilizzati in numerose applicazioni per migliorare
la sicurezza, come il controllo della velocità (cruise
control) adattativo, la protezione dalle collisioni e la
frenatura di emergenza autonoma. I sistemi radar
automobilistici a corto raggio possono attualmente
funzionare su due bande di frequenza, la banda K
(24 GHz) e la banda W (79 GHz). L’utilizzo nella
banda K a minor frequenza verrà abbandonato per
tutti i nuovi veicoli in Europa a partire dal 2022,
per proteggere gli altri utilizzatori della banda a
24 GHz
(1)
. La migrazione verso frequenze più ele-
vate non solo allevierà i problemi di congestione
dello spettro alle frequenze più basse, ma offrirà
anche diversi vantaggi funzionali, come dimensioni
più piccole dei sensori e una maggiore risoluzione
spaziale con l’utilizzo di una più ampia larghezza
di banda. I sistemi di visione si stanno evolven-
do con l’utilizzo di telecamere stereo, più piccole e
dotate di una risoluzione maggiore; queste hanno
caratteristiche migliori rispetto ai radar in termi-
À
Sebbene le telecamere siano piuttosto
economiche, richiedono però un’elevata
potenza di calcolo per essere utilizzate
À
"
qualità si ottengono quando le condi-
zioni di illuminazione e meteorologiche
sono favorevoli, altrimenti la qualità
degrada rapidamente. I sensori LiDAR
e a infrarossi rappresentano delle tecno-
logie emergenti per il settore automobi-
listico. Nessuna delle due è attualmente
utilizzata su larga scala a causa dei loro
costi elevati. I sensori LiDAR creano im-
magini 3D ad alta risoluzione, un’infor-
mazione critica per i sistemi a guida au-
tonoma. Tuttavia, così come le normali
telecamere, sono anch’essi sensibili agli
effetti delle condizioni metereologiche. I
sensori a infrarossi, d’altro canto, sono
in grado di acquisire immagini anche al
buio. Questi tipi di sensori dovranno di-
ventare molto più economici per essere
utilizzati su larga scala nel settore au-
tomobilistico. Poiché ogni tipo di sensore
À
-
dustria dell’auto si sta orientando all’u-
tilizzo di molteplici tipo di sensori, per
sfruttare i rispettivi punti di forza e ridurre le limi-
tazioni caratteristiche di ogni tipologia di sensore.
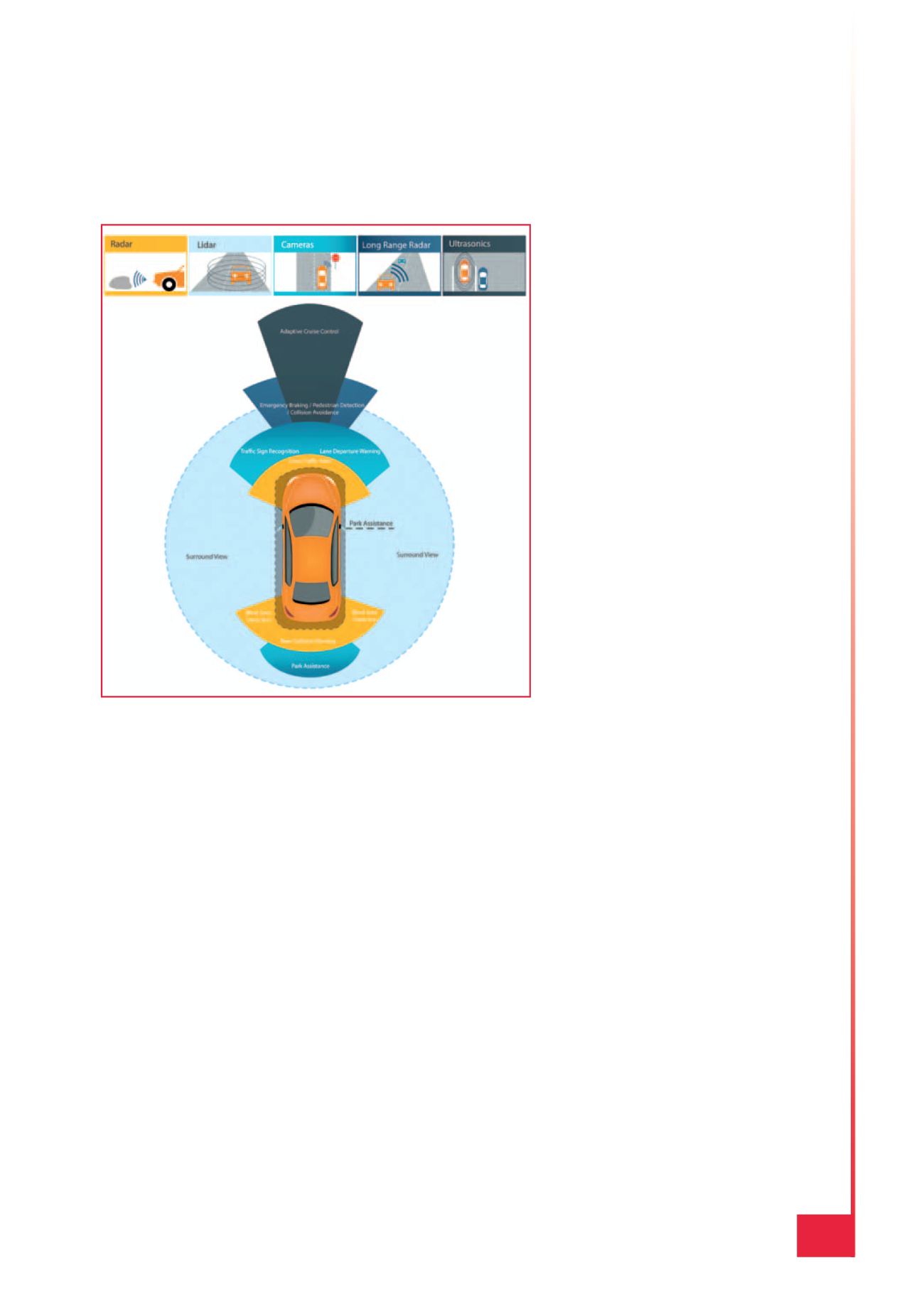
Il termine utilizzato per descrivere questa tenden-
za è ‘fusione sensoriale’, o ‘sensor fusion’ (Fig. 1). La
diversità tecnologica e la ridondanza garantita dal-
la fusione sensoriale viene considerata indispensa-
bile per far sì che il veicolo abbia una percezione
À
Comunicazioni V2X
I veicoli autonomi richiedono funzioni di comunica-
zione più potenti rispetto a quelli previsti in una
rete di sensori per applicazioni ADAS. V2X (Vehi-
< < Y U
À
le tecnologie abilitanti per potenziare la percezione
dell’ambiente circostante tramite la comunicazione
del veicolo con altri veicoli o con l’ambiente esterno
in generale (Fig. 2). Il concetto comprende la capa-
cità di un veicolo di scambiare messaggi con altri
veicoli (V2V – vehicle to vehicle), reti (V2N vehicle
to network), pedoni (V2P vehicle to pedestrian) e
infrastruttura (V2I vehicle to infrastructure). Le
Fig. 1 – La fusione di informazioni raccolte da sensori tec-
nologicamente diversi garantisce una percezione affidabile
dell’ambiente che circonda il veicolo