


















 45 / 84
45 / 84

45
IoT |
hardware
EMBEDDED
57 • SETTEMBRE • 2015
che usano collegamenti wireless dalle sommità
dei lampioni verso i rispettivi hub.
Esiste comunque un’altra possibilità. Un osser-
vatore “intelligente”, visionando i filmati pro-
venienti da alcune telecamere di sicurezza, po-
trebbe individuare facilmente quali sono i lam-
pioni accesi, quali sono i parcheggi occupati e il
momento in cui le luci dei semafori dovrebbero
cambiare. Il risultato finale sarebbe una drasti-
ca riduzione del TCO (Total Cost of Ownership
– ovvero il costo totale di possesso), a fronte di un
aumento dell’affidabilità e dell’aggiunta di fun-
zionalità di salvaguardia e sicurezza che non sa-
rebbero stato possibile implementare con l’utiliz-
zo di un gran numero di semplici sensori (Fig. 1).
Concetti simili a quelli appena esposti possono
essere applicati ad altre tipologie di sistemi. Gli
stimatori di stato che utilizzano modelli mate-
matici computazionali dei sistemi sono in grado
di calcolare la posizione di un albero motore a
partire dai valori di corrente e tensione degli av-
volgimenti del motore come pure lo stato di una
reazione chimica in base a osservazioni fatte
dall’esterno. In generale, la tendenza prevalente
prevede l’impiego di un numero ridotto di senso-
ri remoti – molto spesso telecamere – supportati
da risorse di elaborazione piuttosto che un gran
numero di sensori che possono far insorgere pro-
blemi in termini di consumi, connettività, affida-
bilità e sicurezza.
Cambiamenti radicali
L’idea di sostituire algoritmi di elaborazione
particolarmente onerosi – come ad esempi reti
neurali convoluzionali o filtri di Kalman – per
reti di sensori semplici comporta da un lato ovvi
vantaggi, ma pone dall’altro anche alcuni pro-
blemi. I progettisti si trovano quindi di fronte
a un dilemma. È meglio preservare lo spirito
proprio della virtualizzazione trasferendo i dati
originali – che possono essere più flussi di video
con risoluzione 4K – al cloud oppure mettere a
disposizione elevate risorse di elaborazione in
prossimità dei sensori? Entrambi gli approcci
evidenziano pregi e difetti.
L’elaborazione a livello di cloud ha indubbi van-
taggi. In primo luogo si può disporre senza pro-
blemi di tutta la potenza di calcolo necessaria.
Nel caso inoltre si volessero sperimentare algo-
ritmi per analizzare i big data (in pratica tutte
quelle raccolte di dataset che presentano 3 ca-
ratteristiche peculiari, le cosiddette 3V: volume,
velocità, varietà), lo spazio di memorizzazione
a disposizione è pressoché illimitato. Il terzo
vantaggio è rappresentato dal fatto che l’utente
paga praticamente solamente ciò che utilizza. A
tutti questi vantaggi si accompagnano una serie
di problematiche in termini di sicurezza, latenza
e ampiezza di banda. Se l’algoritmo che si inten-
de utilizzare è “intollerante” alla latenza, l’unica
via percorribile è ricorrere all’elaborazione loca-
le. Nel caso invece sia ammessa una certa laten-
za tra l’ingresso dei dati provenienti dai sensori
e la risposta del sistema, il problema diventa
quello di stabilire l’entità di questa latenza e la
variazione ammissibile.
Alcuni algoritmi di controllo, ad esempio, pos-
sono supportare tempi di latenza significativi
all’interno di un un loop a condizione che la la-
tenza sia quasi costante. Problemi di questo tipo
non rappresentano un grosso ostacolo quando
la quantità di dati che viene trasferita verso il
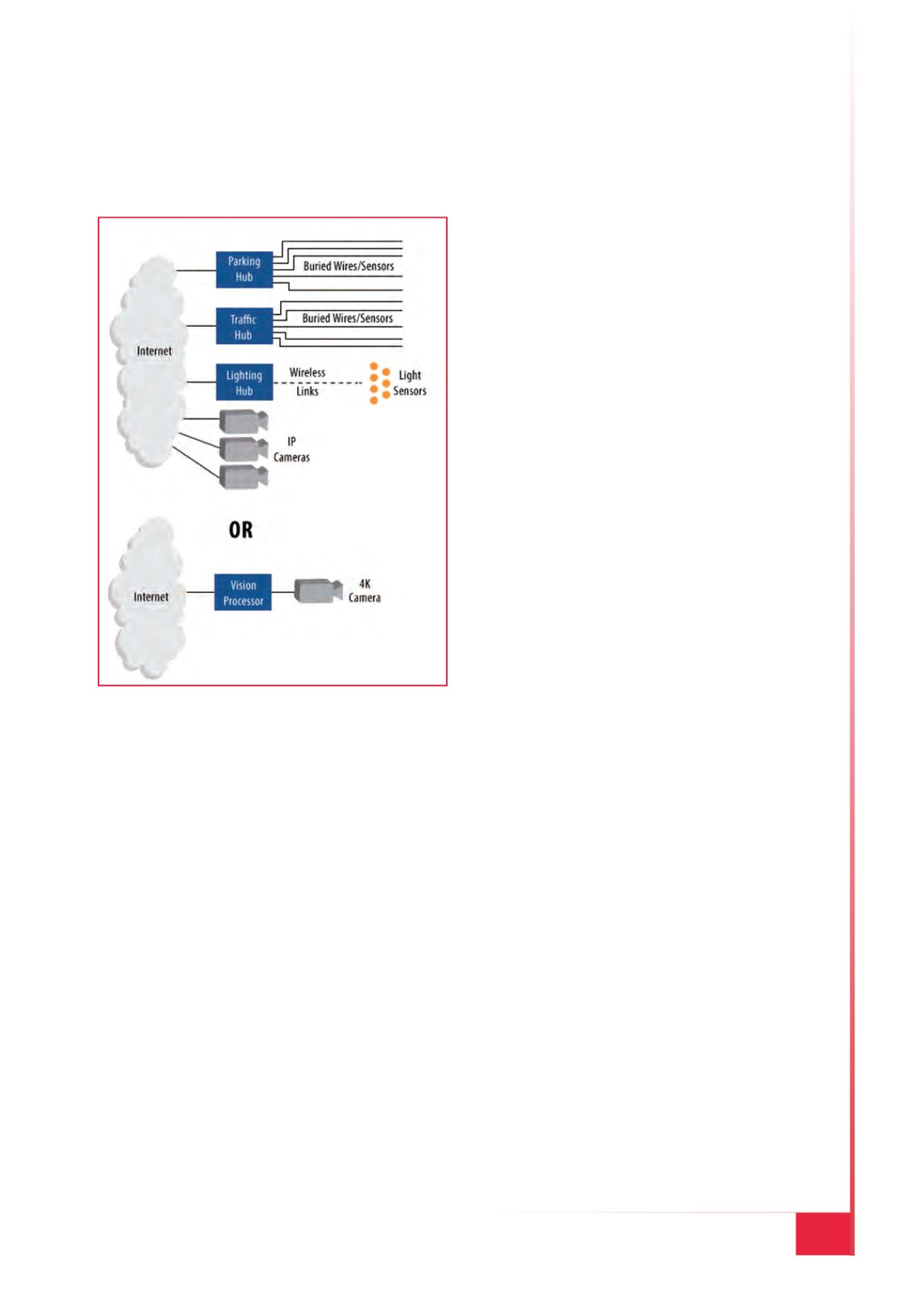
Fig. 1 – Una singola telecamera può essere in
grado di acquisire un maggior numero di dati