


















 11 / 18
11 / 18

POWER 7 - marzo 2015
XI
SEPIC-FED BUCK
Limiti delle topologie POL esistenti
La topologia più comune utilizzata nelle applicazioni PoL è
il convertitore buck sincrono. In questo caso l’utilizzo di un
MOSFET low-side al posto di un diodo contribuisce a ridur-
re in modo significativo le perdite, con conseguente miglio-
ramento dell’efficienza di conversione rispetto a un conver-
titore buck tradizionale. Lo schema di un convertitore buck
sincrono è riportato in figura 1.
Questa topologia richiede un circuito di pilotaggio del MO-
SFET più complesso per controllare entrambi i commutato-
ri. Inoltre, è necessario assicurarsi che entrambi i MOSFET
non siano accesi (turn-on) contemporaneamente, in quanto
si potrebbe creare un corto circuito diretto dalla tensione di
ingresso (Vin) a massa con conseguenze potenzialmente ca-
tastrofiche. Questo tipo di corto circuito è anche noto come
conduzione incrociata (cross-conduction) o shoot-through.
L’impiego di un MOSFET al posto di un diodo di ricircolo
(catch o free-wheeling diode), oltre a ridurre le perdite per
conduzione, consente un flusso bidirezionale della corren-
te dell’induttore. In presenza di carichi di valore ridotto, il
convertitore buck sincrono continua dunque a funzionare
in modalità CCM (Continuous Conduction Mode), mentre
un convertitore buck tradizionale entra in modalità DCM
(Discontinuous Conduction Mode). Un convertitore buck
sincrono può dunque garantire un’elevata efficienza per
correnti di uscita a valore elevato, ma è tutt’altro che effi-
ciente per bassi valori di potenza di uscita.
Ciò significa che il miglioramento dell’efficienza per carichi
di valore ridotto e per correnti di uscita elevate, una priorità
per le apparecchiature di rete della prossima generazione,
rimane un problema irrisolto.
La necessità di fornire una corrente dinamica di notevole
intensità, con una tensione regolata in maniera
molto precisa, permette di evidenziare un’altra
limitazione delle topologie esistenti. Nel caso si
utilizzi un convertitore buck, transistori di carico
di notevole entità danno origine a significative va-
riazioni della tensione di uscita.
Poiché la velocità di variazione della corrente
dell’induttore non è pari a quella della corrente
di carico, il condensatore di uscita deve fornire
la corrente necessaria per alimentare il carico
durante i transistori di quest’ultimo. La tensione
di uscita, quindi, varierà rispetto al valore nomi-
nale stabilito, a causa della scarica del condensa-
tore. Viceversa, un transitorio di carico veloce di
tipo “step-down” produrrà una sovraelongazione
(overshoot) di tensione, imputabile alla carica
del condensatore.
A causa del funzionamento sincrono a frequen-
za costante, il controllore non può reagire immediatamente
per accendere il commutatore di controllo a seguito di una
variazione a gradino della corrente di carico. Il controllore
deve quindi attendere il successivo impulso di clock prima
che il commutatore di controllo sia nuovamente acceso.
L’ampiezza di banda finita del compensatore lineare – pro-
gettata in modo da essere una frazione della frequenza di
commutazione allo scopo di garantire la stabilità del sistema
– impedisce alla tensione di controllo di aumentare con una
velocità sufficiente. A causa di questi due fattori combinati,
l’integrale della scarica del condensatore è maggiore rispet-
to al caso ideale.
Poiché l’ampiezza di banda del compensatore è progettata
in funzione della frequenza di commutazione, una soluzione
ovvia per affrontare le problematiche appena sopra deline-
ate è incrementare la frequenza di commutazione del con-
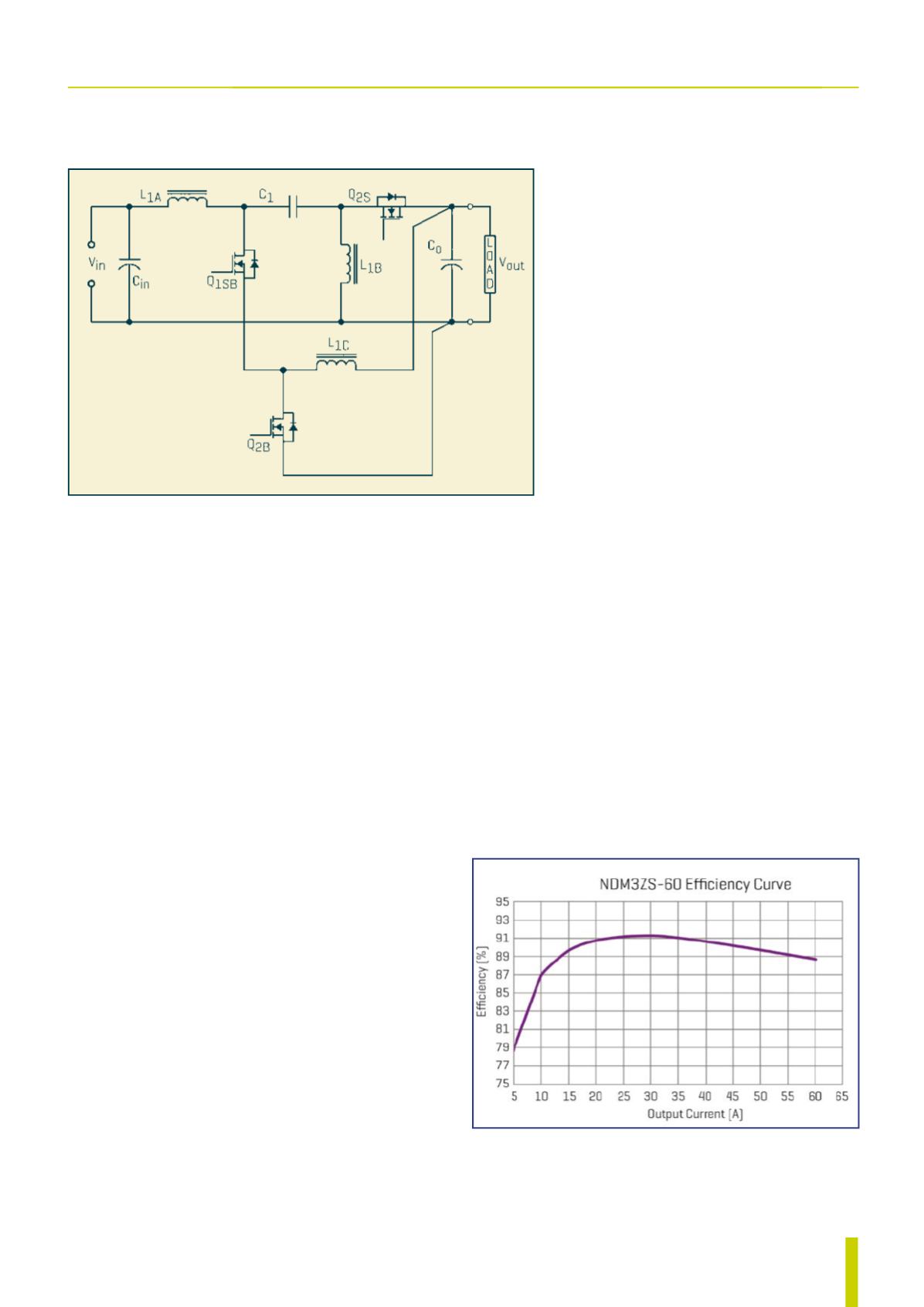
Fig. 2 – Schema di un convertitore SEPIC-fed buck
Fig. 3 – Andamento dell’efficienza in funzione della
corrente di uscita di un convertitore SEPIC-fed buck
da 60A con ingresso a 12V e uscita a 1V