

















 10 / 18
10 / 18

MEDICAL 7 - aprile 2015
X
Medical
grammabili per il pilotaggio del LED sono gli altri compo-
nenti richiesti per completare il progetto analogico.
Un filtro di interpolazione (1:2, 1:4, and 1:8) disponibile
sui convertitori D/A a 12 e a 8 bit consente di migliorare
le prestazioni dinamiche e ridurre l’ampiezza di banda del
bus (Fig. 4).
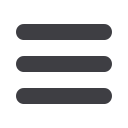
La sincronizzazione dell’avvio del pattern del convertitore
D/A con il campionamento del convertitore A/D permet-
te di misurare in modo semplice l’impedenza utilizzando
la sintesi della forma d’onda digitale e circuiti sincronizzati
per una generazione della forma d’onda coerente e la rac-
colta dei dati del convertitore A/D (Fig. 5).
Una TPU (Trust Protection Unit) garantisce la sicurezza
L’integrazione di funzioni di sicurezza è essenziale per ga-
rantire la protezione dell’integrità dei dati generati dal di-
spositivo medicale. Il firmware del SoC è protetto perché
le memorie flash e SRAM pos-
sono essere criptate mediante
una chiave memorizzata in una
memoria con batteria di back-
up (battery-backed memory).
L’autenticazione del dispositi-
vo è eseguita mediante blocchi
criptati e può supportare sche-
mi di natura sia simmetrica sia
asimmetrica.
Molto è già stato scritto su ar-
gomenti quali sicurezza integrata, criptografia, chiavi pub-
bliche e segrete. In questa sede è opportuno evidenziare
il fatto che il microcontrollore MAX32600 supporta gli
algoritmi AES ed ECDSA rispettivamente per la criptazio-
ne e l’autenticazione
[1]
. Nel momento in cui sono attivati
i sensori dinamici integrati per il rilevamento dei tentati-
vi di manomissione, le chiavi pubblica e segreta saranno
distrutte. Il generatore di numeri pseudo-casuali (PRNG)
conforme allo standard FIPS è in grado di resistere e con-
trastare inmaniera efficace eventuali attacchi alla sicurezza.
Per attenuare gli effetti di attacchi nei confronti della tem-
porizzazione è previsto il ricorso a un oscillatore ad anello
asincrono interno.
Bassi consumi: un fattore chiave
Per ridurre i consumi di potenza sono disponibili parecchi
meccanismi. Il SoC può operare con tensioni di soli 2,2V,
Fig. 5 – Schema a blocchi dell’elaborazione del segnale necessaria per la
misura dell’impedenza
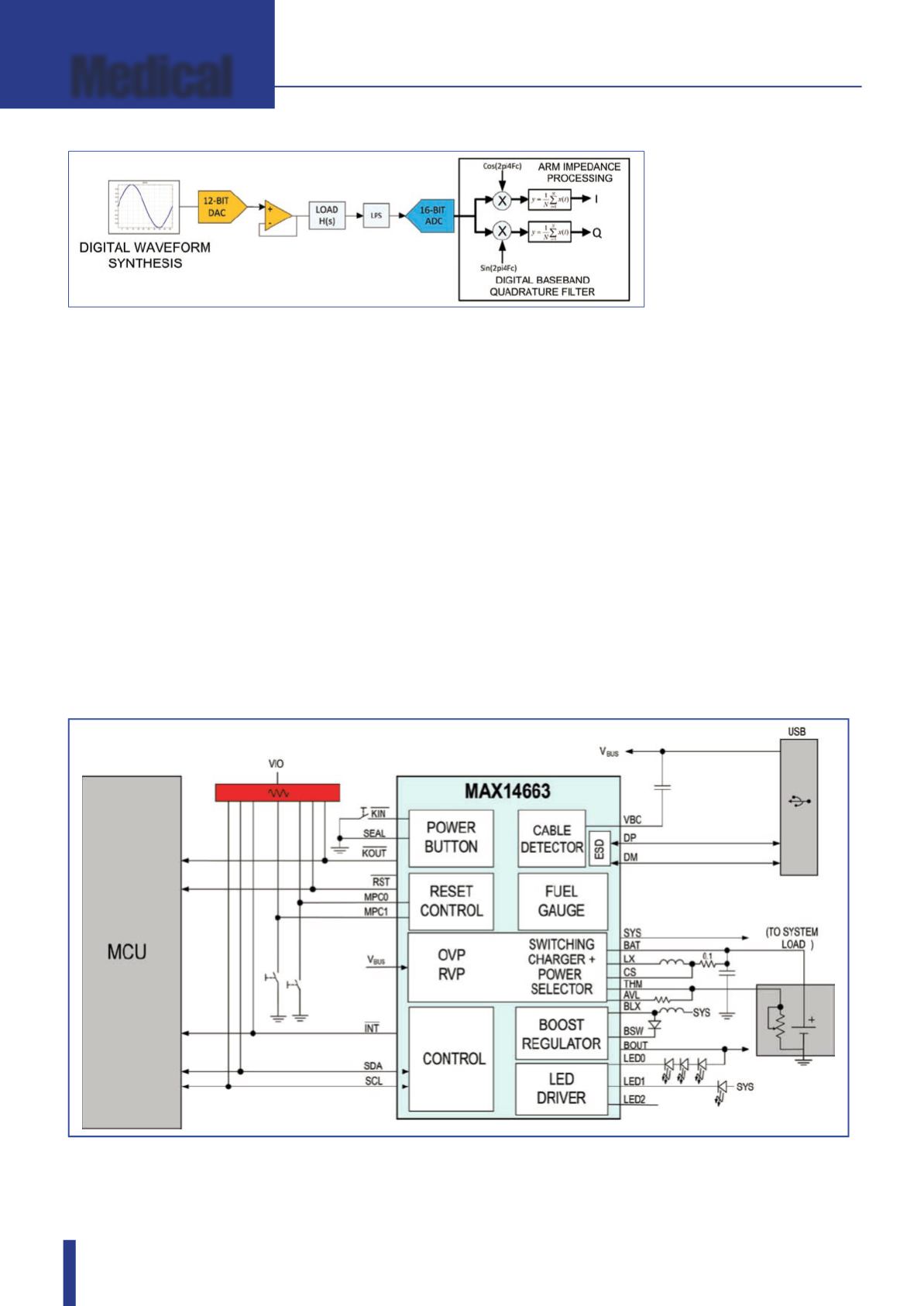
Fig. 6 – Soluzione di potenza ottimizzata con rilevamento del cavo