MEDICAL 4 - marzo 2014
XIV
Medical
Per tutti i punti del pattern usato (il quadrato ABCD). Un
esempio numerico è stato implementato (L = 4 mm, Z =
0.4·X – 0.3·Y, Zs = 20·L). i risultati ottenuti sono mostrati
nelle figure 14 e 15.
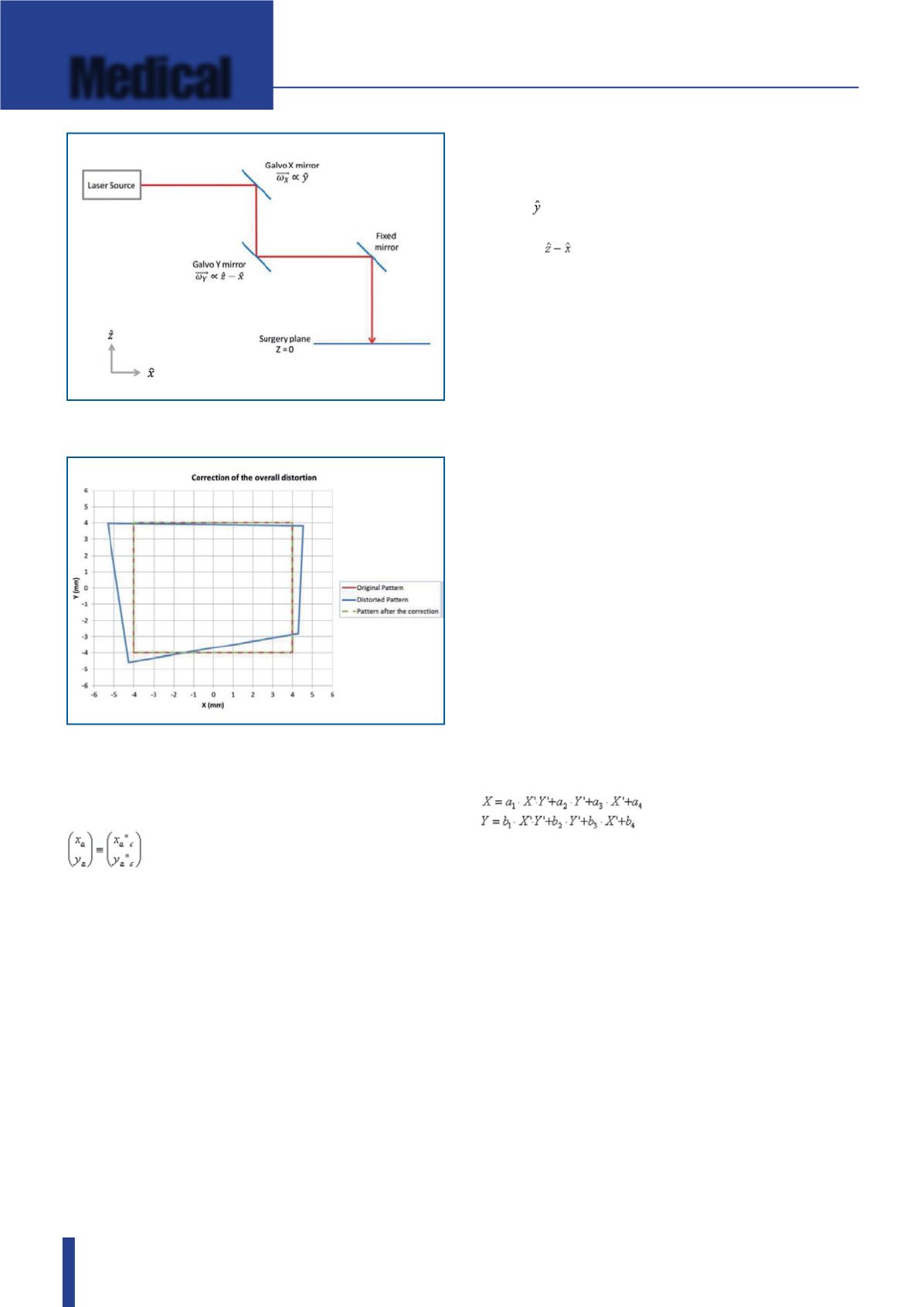
Causa di distorsione (c)
L’ultima causa di distorsione da trattare trova le radici
nella limitata accuratezza/precisione della meccanica del
sistema. In particolare, con riferimento al percorso ottico
compiuto dal fascio laser (Fig. 16), si può affermare che
l’assemblaggio meccanico è perfetto/ideale quando:
•
Il fascio laser (così come fuoriesce dalla sorgente) è
parallelo al piano di lavoro Z=0.
•
Gli specchi sono tutti paralleli tra loro (nella posizione
di riposo) ed esattamente a 45 gradi rispetto al piano Z=0.
•
Gli specchi sono dei piani paralleli all’asse Y.
La rotazione dello specchio sul galvo X avviene lungo il
versore .
•
La rotazione dello specchio sul galvo Y avviene lungo
il versore
.
Qualora anche una sola delle condizioni precedenti non
venga rispettata, allora un’altra distorsione viene introdot-
ta nella generazione di un pattern qualsiasi (come appun-
to quello di riferimento usato per la calibrazione). Questa
distorsione risulta essere simile ad avere fattori di forma
diversi lungo gli assi X e Y (gain X e gain Y), solo che i fat-
tori di forma dipendono dalla distanza rispetto al centro
del punto considerato.
In questa categoria può anche essere inglobata la già di-
scussa distorsione di tipo (b). La tecnica per testare l’algo-
ritmo di tuning anche in questo caso è lo stesso:
1)
si trova una descrizione matematica che modella la di-
storsione in oggetto;
2)
si applica tale modello alle coordinate dei punti origi-
nali del pattern (ossia si “applica la distorsione”);
3)
ai punti così ottenuti viene applicato l’algoritmo di
correzione descritto in queste pagine, ottenendo dei nuo-
vi punti “corretti”;
4)
questi vengono poi dato di nuovo in pasto al modello
della distorsione;
5)
a questo punto si tratta solo di verificare che i punti
generati al punto 4 corrispondano esattamente agli origi-
nali (quelli al punto 2).
Si supponga che tutte le distorsioni elencate sopra possa-
no essere modellate da equazioni del tipo:
Come esempio numerico per validare la tecnica di corre-
zione si sono usati i parametri: L = 4 mm, a1 = 0.02, a2 =
-0.05, a3 = 1.15, a4 = -0.2, b1 = -0.03, b2 = 0.95, b3 = 0.1, b4
= 0.1. I risultati ottenuti sono illustrati in figura 17.
In questo articolo è stato presentato un nuovo, preciso e
completamente automatico metodo per la correzione del-
le distorsioni presenti nei sistemi di azionamenti dei gal-
vo scanner impiegati nei laser a eccimeri per applicazioni
chirurgiche.
Esempi numerici e pratici sono stati impiegati per dimo-
strarne e supportarne la validità e l’efficacia. In tutti gli
impieghi reali l’errore relativo dopo la correzione è di
gran lunga inferiore all’1% (≈2‰) o, in altri termini,
l’errore residuo assoluto è assai inferiore alle dimensioni
della sezione trasversale del fascio laser con cui si effettua
la chirurgia.
L’algoritmo di cui sopra è stato implementato e lavora
con successo sui macchinari laser attualmente presenti sul
mercato.
Fig. 16 – Schematizzazione del percorso ottico del
fascio laser
Fig. 17 – Il risultato della correzione (tracciato
verde) è coincidente con quello desiderato (trac-
ciato rosso)


