MEDICAL 4 - marzo 2014
X
Medical
rezione del tipo offset + guadagno sia tutto tranne che ac-
curata, anche se il risultato finale è di nuovo un cerchio
(come si può vedere dalle Figg. 3 e 4).
Per confermare quanto detto sopra, è sufficiente cambiare
pattern di riferimento con un altro, non circolare; un qua-
drato 10 mm x 10 mm verrà considerato in questa sede.
Le figure 5 e 6 di cui sopra mostrano palesemente i limiti
di una correzione basata sul concetto di offset + guada-
gno, dal momento che il risultato ottenuto è assai diverso
da quello atteso. Inoltre, ad aggravare le cose, c’è il fatto
che le distorsioni introdotte da meccanica ed elettronica
insieme si combinano in maniera non lineare, portando a
risultati del tipo rappresentato in figura 7.
La mancata correzione della distorsione di cui nell’esem-
pio sopra impatta direttamente la qualità della chirurgia e
il risultato che da essa ne deriva, a discapito del paziente,
che non gioverà mai appieno dei vantaggi di una opera-
zione chirurgica mediante a laser.
La nuova tecnica
In questo articolo viene presentato un altro metodo di ca-
librazione, completamente automatico e facile da imple-
mentare nella fase di calibrazione del macchinario. Essa
consiste nell’usare un pattern di riferimento quadrato
(anche se in realtà non serve per intero, ma sono suffi-
cienti i suoi 4 vertici). Questo quadrato è grande 2L x 2L
(con L=5 mm, tipicamente).
I vertici del quadrato saranno rilevati da una camera che
fornirà al sistema di controllo le coordinate X-Y dei 4 pun-
ti riferiti al proprio sistema di riferimento (della camera).
La videocamera verrà calibrata in precedenza (normal-
mente si usa un pattern di calibrazione meccanico, rileva-
to dalla camera e l’immagine rilevata viene elaborata dal
software centrale per correggere eventuali offset e aspect-
ratio); d’ora in avanti sarà indicato con X-Y il sistema di
riferimento “visto” dalla camera.
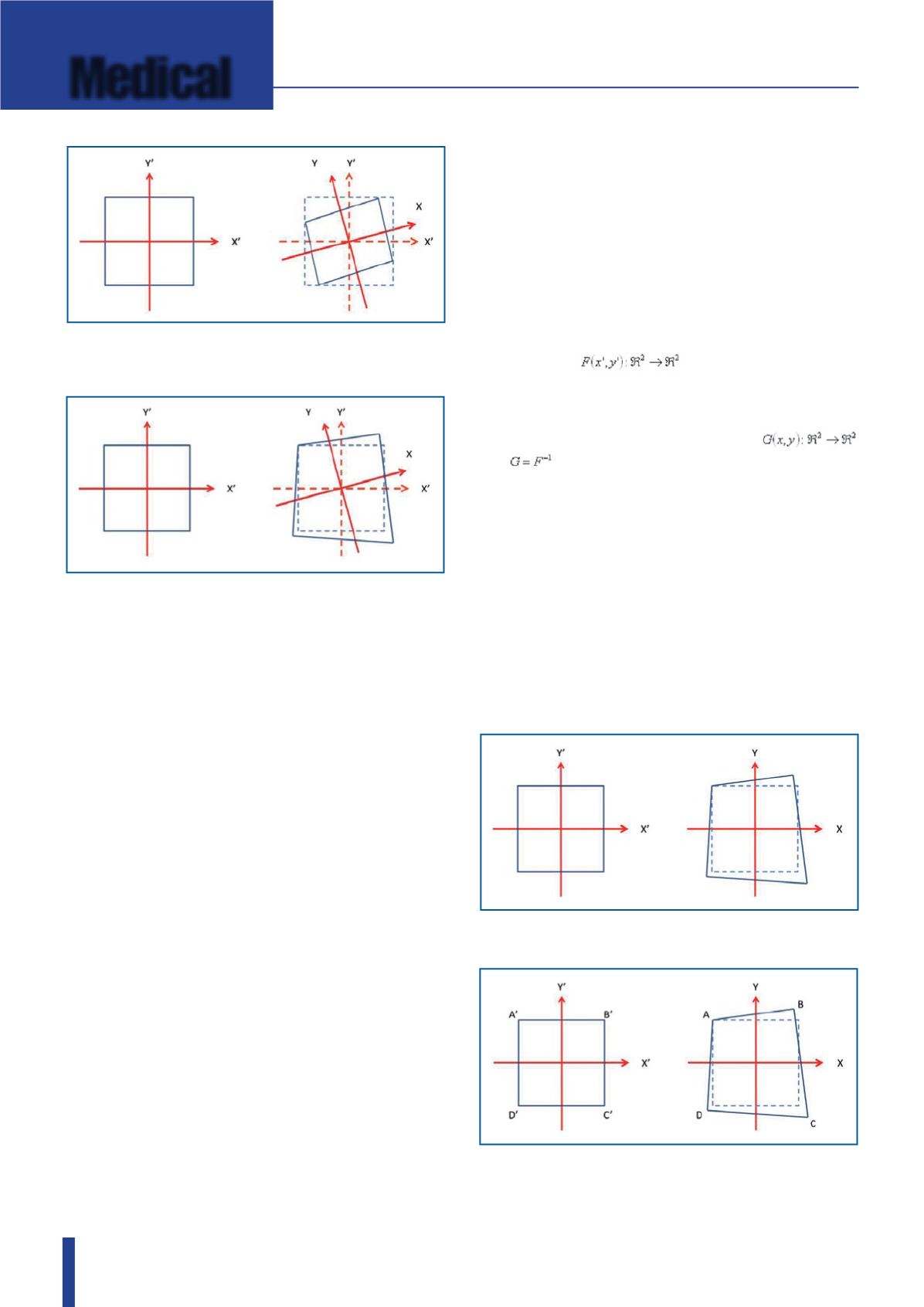
Una volta che l’offset è stato corretto, è possibile descrive-
re la funzione
che trasforma il quadrato
ideale in un quadrilatero qualunque (i.e. il quadrato di-
storto, Fig. 8).
Se si riesce a trovare una espressione analitica per la fun-
zione F(x’,y’) allora la funziona inversa
con
esiste e, tramite questa, risulta molto semplice
calcolare il nuovo pattern da applicare in ingresso alla F()
per ottenere come risultato il pattern desiderato sul piano
focale.
Questo metodo è stato implementato con successo e la-
vora bene sotto l’ipotesi che le distorsioni introdotte dal
sistema possano essere considerate lineari; ipotesi intrin-
secamente valida, dal momento che le dimensioni geome-
triche dell’area di interesse per la chirurgia oculare (un
cerchio di raggio inferiore ai 10 mm) sono trascurabili
rispetto a tutte le altre dimensioni in gioco, tipo la lun-
ghezza del cammino ottico che il laser deve compiere per
raggiungere il piano focale (≈1m).
In figura 9 con l’apice (‘) vengono indicati i punti nel si-
Fig. 6 – Pattern quadrato – Distorsione dopo la
correzione (la rotazione degli assi non viene cor-
retta)
Fig. 7 – Pattern quadrato – Distorsione dopo la cor-
rezione (altre fonti di distorsione sono presenti)
Fig. 8 – Effetto delle distorsioni (descritte come
F(x’,y’))
Fig. 9 – Descrizione della F(x’,y’)


