MEDICAL 4 - marzo 2014
XII
Medical
(Zc=0).
c)
Uno o più specchi lungo il percorso ottico non sono
perfettamente allineati.
d)
I galvo driver -”semplificabili” come dei convertitori
digitale/analogici (DAC) con uscita in corrente- presen-
tano un errore di offset e di guadagno.
Tutte queste distorsioni possono considerarsi lineari dal
momento che le dimensioni dell’area di interesse sono
trascurabili rispetto alla lunghezza del cammino ottico
percorso dal fascio laser. È chiaro a questo punto come,
delle 4 sorgenti di distorsione elencate sopra, solo l’ultima
viene effettivamente corretta con il metodo classico di cor-
rezione di offset e guadagno.
Tutte le distorsioni combinate insieme portano alla tra-
sformazione
, come mostrato in figura 10.
Forti della linearità di cui sopra, si potranno analizza-
re separatamente gli effetti delle 3 principali distorsioni
di cui sopra come operanti una per volta (in accordo al
principio di sovrapposizione degli effetti), verificare che il
metodo di tuning sia efficace per ognuna di esse e quindi
(sempre in virtù dell’ipotesi di linearità del sistema) esten-
dere la sua validità qualora, nel caso reale, queste agiscano
tutte insieme contemporaneamente.
Causa di distorsione (a)
Si trascurino per un attimo eventuali offset (le cui corre-
zioni sono a complessità nulla) e ci si concentri sulla di-
storsione introdotta quando il piano Xc-Yc della telecame-
ra risulti ruotato di una angolo arbitrario rispetto al paino
di lavoro X-Y (Fig. 11).
Detto θ l’angolo in questione, la trasformazione della rota-
zione su piano in senso antiorario è descritta dalle equa-
zioni:
Pertanto ogni punto del pattern ideale X’-Y’ verrà “trasfor-
mato” secondo le equazioni viste sopra; i punti così ruotati
verranno rilevati dalla telecamera (e quindi le loro coor-
dinate saranno disponibili nel sistema Xc-Yc); questi ver-
ranno “anti-trasformati” secondo la funzione inversa G(),
ottenendo:
A ogni punto del pattern ideale X’-Y’ corrisponderà dun-
que un Xc’-Yc’ che andranno passati ai galvo driver per
ottenere il pattern voluto. Questo significa che, applican-
do la distorsione/rotazione nota a questi punti, se ne ot-
terranno altri che coincideranno con quelli iniziali (del
pattern ideale).
Un esempio numerico è stato implementato con L=4 mm
e θ=10degrees; in figura 12 sono mostrati i risultati otte-
nuti.
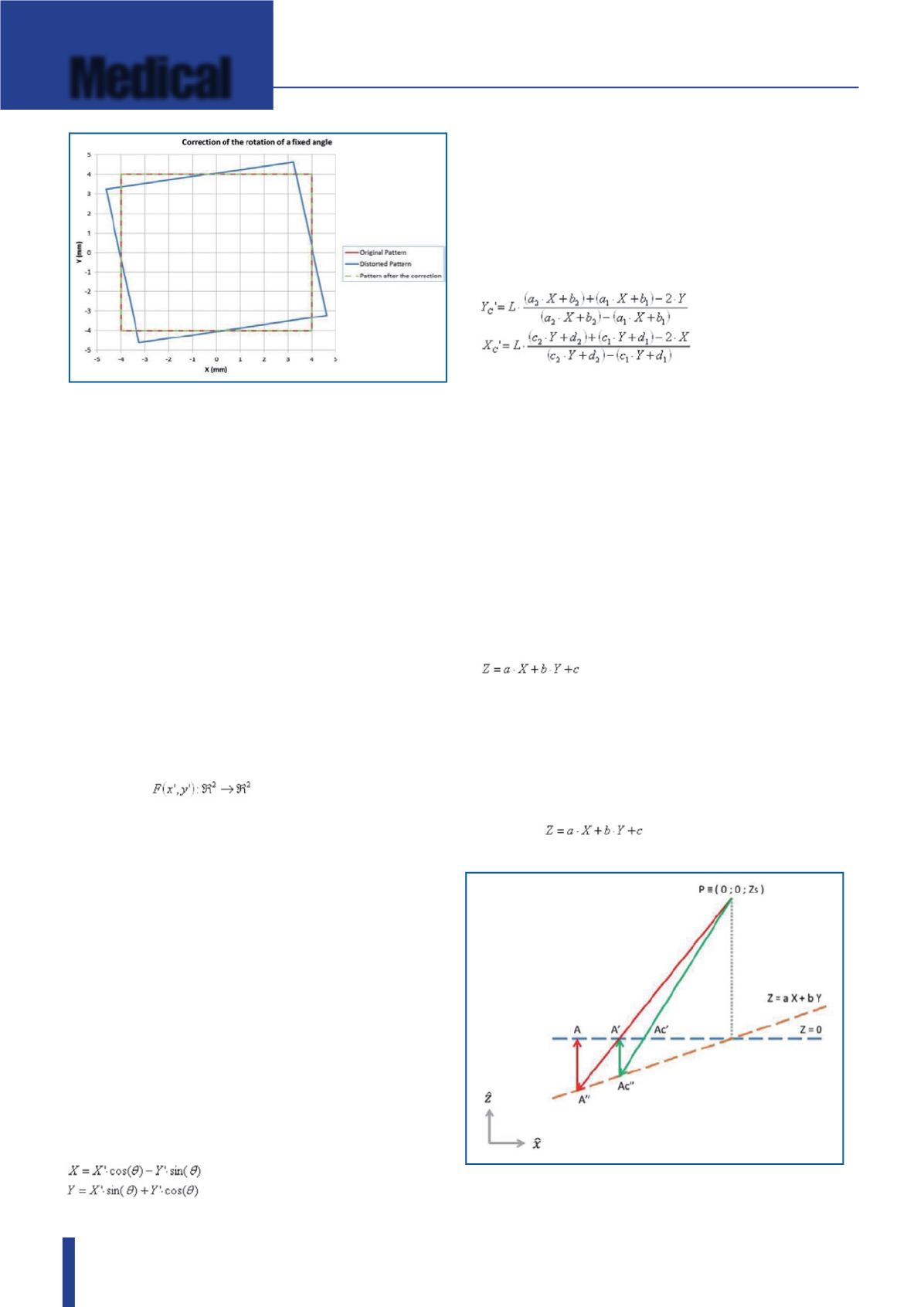
Causa di distorsione (b)
Questo è il caso in cui il piano di lavoro ideale (di equazio-
ne Z=0) non sia esattamente “orizzontale” ma inclinato; in
breve, l’equazione del piano è in realtà qualcosa del tipo:
In cui può considerarsi c=0, ossia il centro è meccanica-
mente allineato (e ad ogni modo si tratta di un puro of-
fset).
Il fascio laser traccia una linea da un punto assegnato P
≡
(0 ; 0 ; Zs); il risultato ottenuto disegnando il pattern con
il laser (un quadrato nel piano Z=0) viene così proiettato
sul piano
, cosicché il quadrato diventa un
quadrilatero non regolare. Le proiezioni non sono orto-
Fig. 12 – Il risultato della correzione (tracciato
verde) è coincidente con quello desiderato (trac-
ciato rosso)
Fig. 13 – Distorsione del piano di lavoro non per-
fettamente orizzontale


