MEDICAL 4 - marzo 2014
XI
CALIBRAZIONE
stema di coordinate così come gestiti dal software di con-
trollo (ossia le coordinate inviate ai galvo driver), mentre
i punti senza apice indicano i corrispondenti nel sistema
di coordinate reali (l’uscita fisica del sistema sul piano fo-
cale, così come vengono visti dalla camera).
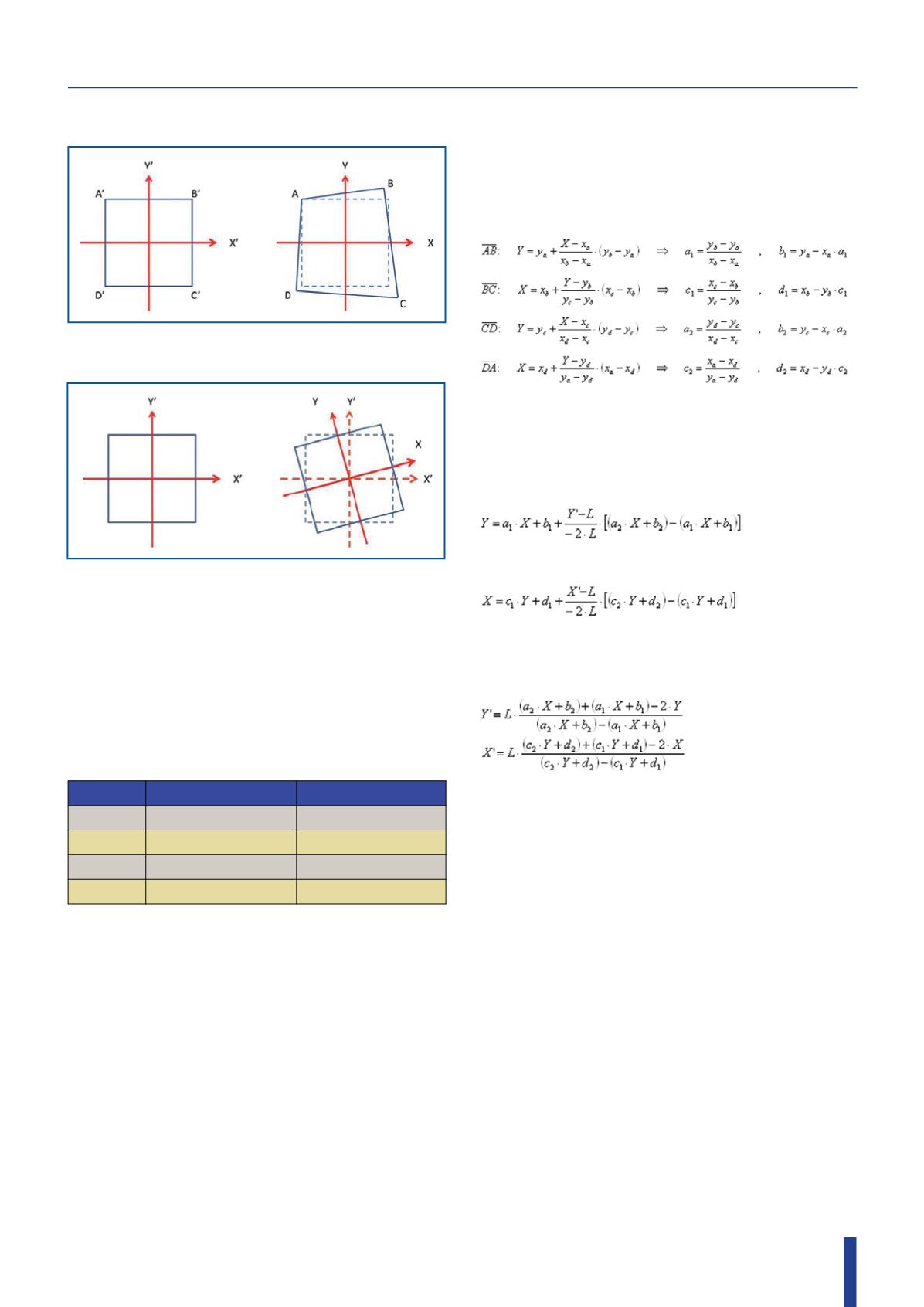
Osservando il quadrilatero risultante, è possibile indivi-
duare 4 tratti lineari:
Segmento Pattern di riferimento
Pattern ottenuto
AB
Y’ = L
Y = a1 * X + b1
BC
X’ = L
X = c1 * Y + d1
CD
Y’ = -L
Y = a2 * X + b2
DA
X’ = -L
X = c2 * Y + d2
In cui a1…d2 possono essere calcolati, mentre L è una
costante numerica nota (5 mm).
Nel caso ideale di sistema perfettamente calibrato e as-
semblato, risulterà
a1 = a2 = c1 = c2 = 0
b1 = d1 = -b2 = - d2 = L
I punti A…D vengono rilevati dalla camera, cosicché le
loro coordinate sono note (nel sistema di coordinate X-Y,
quello della camera):
A
≡
(xa, ya)… D
≡
(xd, yd)
Con i valori ora noti di xa…yd (con una semplice mani-
polazione dell’immagine rilevata dalla camera) è allora
possibile calcolare tutti i parametri a1…d2:
Sulla base dell’ipotesi di linearità dal sistema (sempre va-
lida, come visto sopra) è possibile affermare che il pattern
ottenuto “si muove linearmente” dal segmento AB a quel-
lo CD. Si potrà quindi scrivere:
Identicamente per la coppia BC / CD:
Insieme, le due equazioni sopra rappresentano un siste-
ma di 2 equazioni in 2 incognite (in altre parole, la fun-
zione F() cercata), la cui soluzione diventa:
che rappresentano invece la funzione inversa G() cercata.
A questo punto, ogni punto (X,Y) della mappa chirurgica
da applicare al paziente deve essere corretto attraverso la
funzione G() di sopra, ottenendo i nuovi valori corretti
(X’c,Y’c) che verranno dati in ingresso ai galvo driver al
posto degli originali (X,Y).
Come visto, il metodo è assolutamente automatico (chia-
ramente una volta che la videocamera sia stata calibrata).
Efficacia del nuovo metodo
Al fine di validare la tecnica di calibrazione sopra esposta,
occorre comparare numericamente i due metodi (quel-
lo “classico” e il “nuovo”); per poter far ciò, è necessario
modellizzare le distorsioni eventualmente introdotte dal
sistema. Le maggiori cause di distorsione sono di natura
meccanica (assemblaggio) ed elettronica (galvo driver), e
possono essere riassunte in:
a)
Il piano Xc-Yc della telecamera è ruotato rispetto al
piano X’-Y’ dei galvo.
b)
Il piano di lavoro X’-Y’ (di equazione Z’=0) non cor-
risponde al piano “orizzontale” visto dalla telecamera
Fig. 10 – Effetto delle distorsioni (descritte come
F(x’,y’))
Fig. 11 – Effetto di una rotazione secondo un an-
golo fissato


