
















 62 / 84
62 / 84

EMBEDDED
FEBBRAIO
62
SOFTWARE
|
SELF DRIVING
virtualizzati con un impatto minimo sulla BOM
dell’autovettura. È possibile impostare canali
privati attraverso regioni di memoria condivisi
come pure applicare autorizzazioni di lettura/
scrittura, solo lettura o solo scrittura.
Le velocità di comunicazione non sono più limi-
tate dalle proprietà elettriche dei cablaggi ma
possono essere caratterizzate da una velocità
pari a quella dell’accesso in memoria. Inoltre è
possibile implementare metodologie di autenti-
cazione e rilevamento delle intrusioni in modo
da garantire che i segnali provengano dalle fonti
corrette (Fig. 3).
Portabilità del software
I costruttori automobilistici non vogliono “ripar-
tire da zero” ogni volta che devono realizzare un
nuovo modello di autovettura.
Il software scritto per un particolare tipo di vet-
tura deve poter essere trasferito sui nuovi model-
li non modo da evitare la riscrittura del codice.
Lo standard AUTOSAR è stato sviluppato per af-
frontare questo problema e consente ai principali
OEM e fornitori strategici di livello 1 (Tier 1) di
scrivere i moduli software basati su uno standard
comune in modo da consentire di “mappare fun-
zioni e reti funzionali per i diversi nodi di con-
trollo di un sistema in modo quasi indipendente
dall’hardware associato”
(3)
.
Una delle più recenti aggiunte all’ecosistema
AUTOSAR è AUTOSAR Adaptive Platform (AP).
Mentre il set di applicazioni della piattaforma CP
1 )
+ À
-
do il codice è compilato, AP implementa un am-
biente POSIX progettato per consentire l’aggiun-
ta “al volo” di nuove applicazioni a un veicolo.
AUTOSAR AP è stato anche scritto per suppor-
tare il concetto di macchine virtuali. In ogni caso,
AUTOSAR AP non è stato progettato per sosti-
tuire CP, quindi è importante che un controllore
del dominio sia in grado di ospitare entrambe le
piattaforme (Adaptive e Classic). In questo modo
un codice già scritto per i microcontrollori della
piattaforma CP (Classic Platform) potrà essere
À
minime per quanto riguarda il comportamento
delle temporizzazioni.
Scelta dell’hypervisor
Sul mercato esistono parecchi ‘embedded hyper-
visor’ e tutti, almeno in teoria, svolgono le mede-
sime funzioni. Molti di essi, comunque sono stati
sviluppati effettuando semplicemente una “ridu-
zione” (strip-down) di un sistema operativo esi-
stente. I driver del dispositi-
vo sono mantenuti in questa
À
-
data e assegnati agli “ospiti”
per mezzo di un servizio del-
l’hypervisor. I sovraccarichi
di elaborazione aggiuntivi
associati all’esecuzione di
un RTOS (Real-Time Ope-
rating System) sulla cima
di un altro sistema operati-
vo potrebbe potenzialmen-
te aumentare l’intervallo
di variazione del tempo di
risposta di un sistema, fe-
nomeno questo noto sotto il
nome di jitter. Ciò potrebbe
comportare l’insorgere di
problemi nel momento in cui
si cerca di eseguire software
AUTOSAR di tipo “safety- o
timing-critical”. Il modello
di controllore del dominio
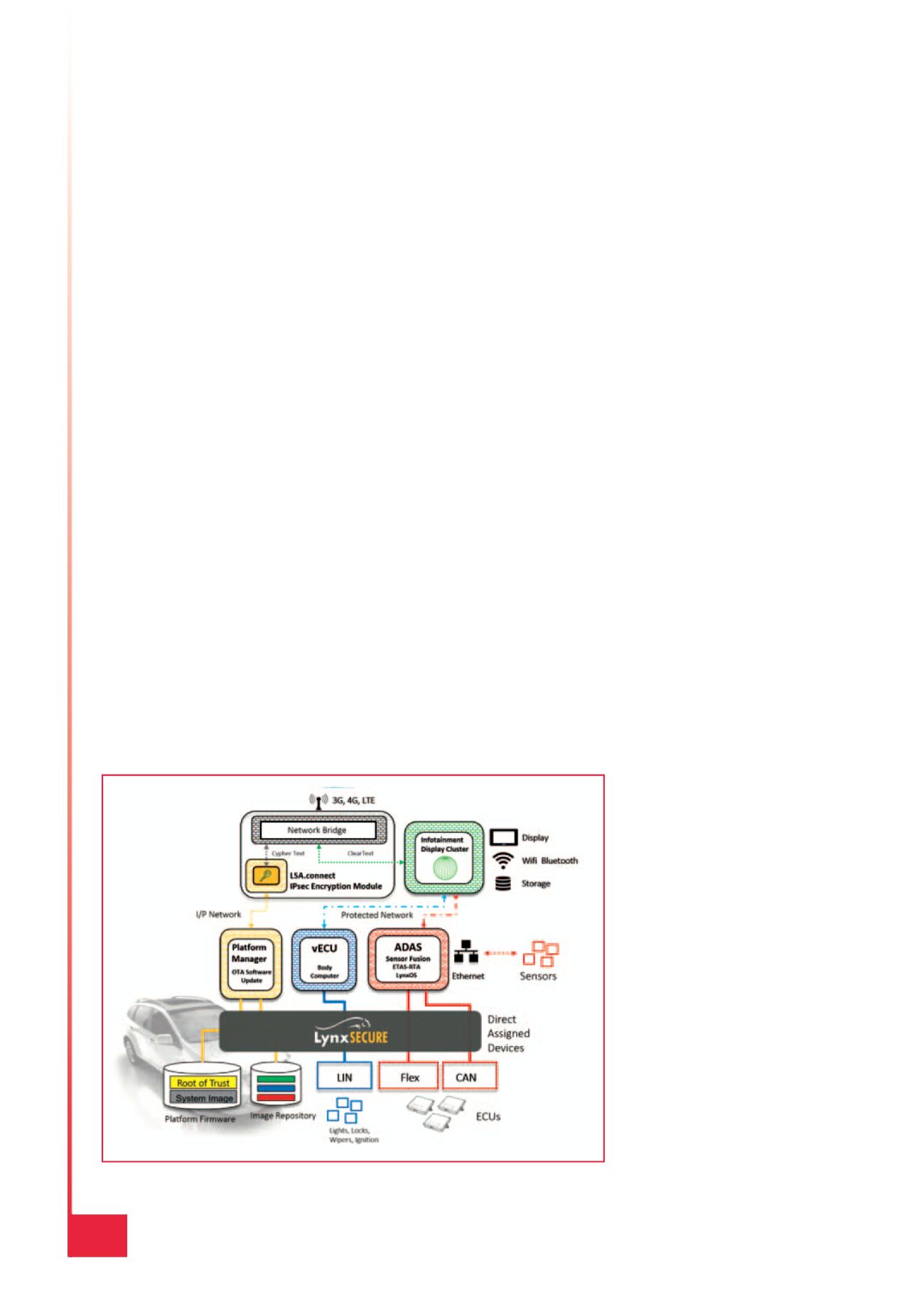
Fig. 3 – Isolare i collegamenti in rete garantisce una comunicazione sicura e protetta
del veicolo