COMPONENTS
ENCODER
74
- ELETTRONICA OGGI 439 - SETTEMBRE 2014
un circuito ASIC (Application Specific Integrated Circuit) con-
ta le variazioni delle linee ed esegue l’interpolazione necessa-
ria per individuare in modo preciso la posizione dell’encoder
e la direzione di rotazione. L’uscita elettrica del circuito ASIC
dell’encoder è perfettamente compatibile, per la natura stessa
del progetto, con quella degli encoder ottici e magnetici. L’imple-
mentazione di un encoder privo di contatti come quella appena
descritta garantisce significativi vantaggi per l’utilizzatore, tra
cui:
garanzia di una maggiore affidabilità intrinseca rispetto a un
approccio di tipo ottico, grazie al fatto che polvere, sporcizia op-
pure olio non influenzano il comportamento del disposi-
tivo;
minore sensibilità alle variazioni di temperatura, con
riflessi favorevoli sull’affidabilità e sulla linearità di funzio-
namento;
minore sensibilità alle vibrazioni rispetto a un disco di
vetro;
assenza di LED che necessitano di regolazione o di so-
stituzione al termine della durata operativa;
funzionamento con correnti dell’ordine di 6-10 mA, di
gran lunga inferiori rispetto a quelle richieste dalle unità
ottiche (20-50 mA); per questo motivo un encoder di que-
sto tipo è adatto all’uso in dispositivi mobili e funzionanti
a batterie.
Poich
é
la famiglia di encoder AMT di CUI non richiede la
presenza di LED o di LOS (Line of Sight – rilievo visivo sen-
za ostacoli), può essere utilizzata in applicazioni fino-
ra precluse agli encoder tradizionali. Un produttore di
apparecchiature di automazione per forni, ad esempio,
doveva risolvere il problema legato ai frequenti fermi
macchina che si verificavano nello stabilimento di un
cliente, provocati dalla presenza di polvere di farina e
di altri agenti contaminanti, che influenzava il funziona-
mento dell’encoder ottico montato su un’unita di produ-
zione chiave. Per garantire un corretto funzionamento
era necessario procedere a un fermo macchina men-
sile, alla sostituzione e al conseguente azzeramento. La
sostituzione dell’unità ottica con una di tipo capacitivo
ha permesso di risolvere questo problema. In un altro
esempio, un costruttore di apparecchiature di perfora-
zione off-shore doveva utilizzare un motore completa-
mente immerso in olio, a causa delle elevate pressioni
previste dall’applicazione considerata. In questo caso è
stato scelto un encoder ottico, grazie alla sua capacità
di operare in modo continuo in un fluido non conduttivo,
come appunto l’olio.
Vi è un altro beneficio, sebbene meno ovvio, per i pro-
gettisti di anelli di controllo PID (Proporzionale-Integra-
le-Derivativo) a regolazione fine, rappresentato dalla
possibilità di regolare il numero di impulsi per giro (ppr) dell’en-
coder, per ottimizzare le prestazioni senza dover cambiare l’en-
coder. La possibilità di modificare in maniera dinamica la risolu-
zione semplifica notevolmente il processo di ottimizzazione del
sistema, che solitamente richiede la regolazione del codice op-
pure la modifica della risoluzione dell’encoder. Nel caso di un
encoder ottico, quest’ultimo processo prevede l’acquisto (e l’in-
stallazione) di differenti encoder, con conseguente incremento
dei costi complessivi e allungamento del ciclo di progetto. Nel
caso di un encoder di tipo capacitivo, invece, l’ingegnere di con-
trollo deve semplicemente modificare la risoluzione dell’enco-
Fig 4 – Esempio di installazione dell’encoder AMT11 di CUI
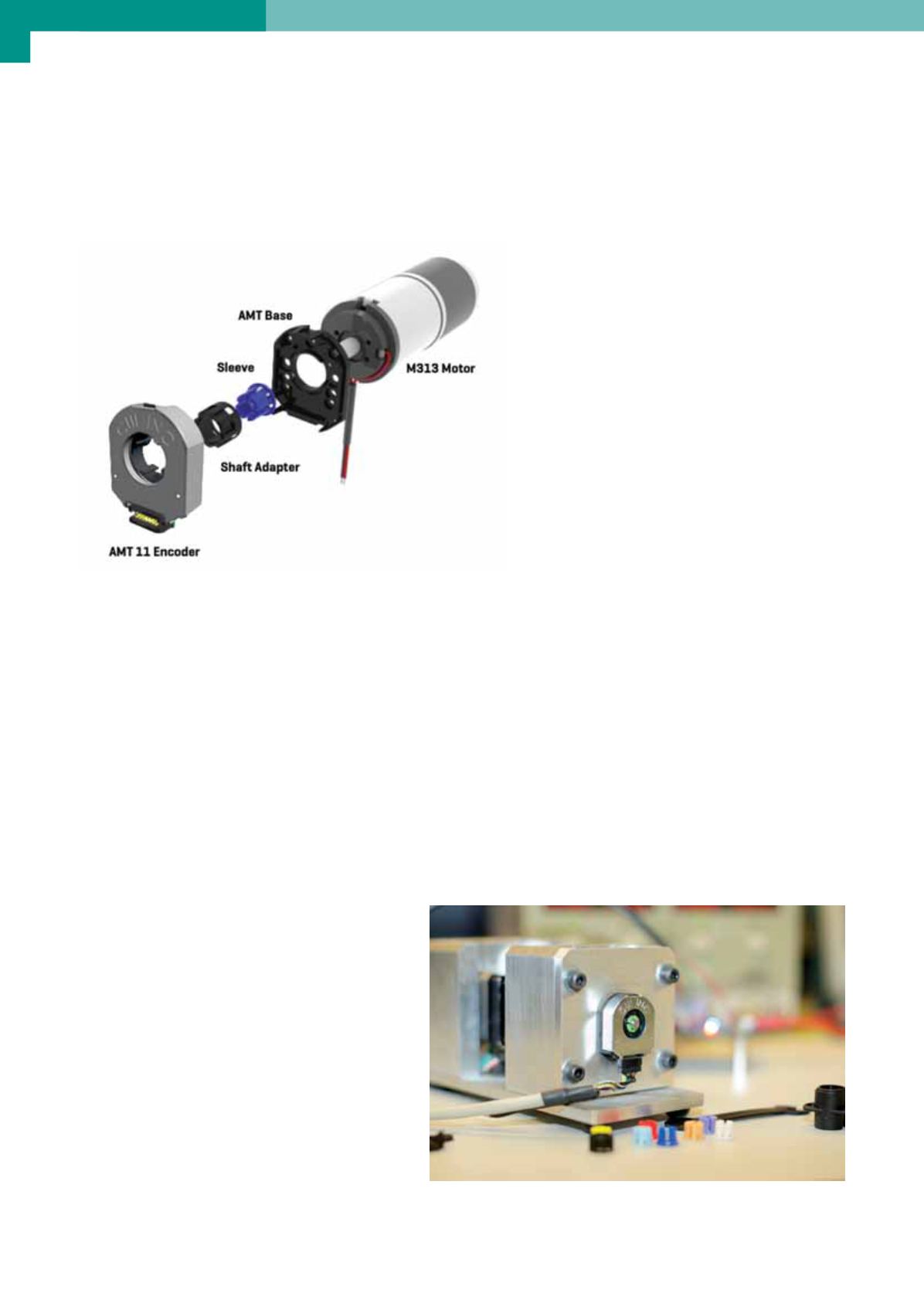
Fig 3 – Vista esplosa dell’assemblaggio di un encoder della famiglia AMT sull’albero
motore


