MEDICAL 4 - marzo 2014
XIII
CALIBRAZIONE
gonali, ma avvengono lungo i raggi vettori dal punto P a
ogni punto (X, Y) del pattern.
Assegnati dunque i punti A’…D’ sul piano ideale (Z=0) si
potranno descrivere le equazioni delle rette PA’…PD’ e,
con queste, calcolare le intersezioni con il piano inclinato
.
Queste intersezioni sono i punti A”…D”, le cui proiezio-
ni ortogonali sul piano Z=0 (che è anche il piano della
telecamera o, almeno, è quello che la telecamera “vede”)
sono i punti A…D di coordinate note (perché appunto
rilevati attraverso la telecamera).
A questo punto si applica l’algoritmo di correzione (dal
momento che i punti A…D sono noti, perché rilevati
dalla telecamera calibrata) e da questi i nuovi punti cor-
retti A’c…D’c vengono calcolati. Dando ora questi nuovi
punti al sistema come nuovi target, si potranno definire
le nuove linee PA’c…PD’c che intersecheranno il piano
nei punti A”c…D”c.
Le proiezioni ortogonali di A”c…D”c sul piano Z=0 do-
vranno corrispondere ai punti iniziali non corretti A’…D’.
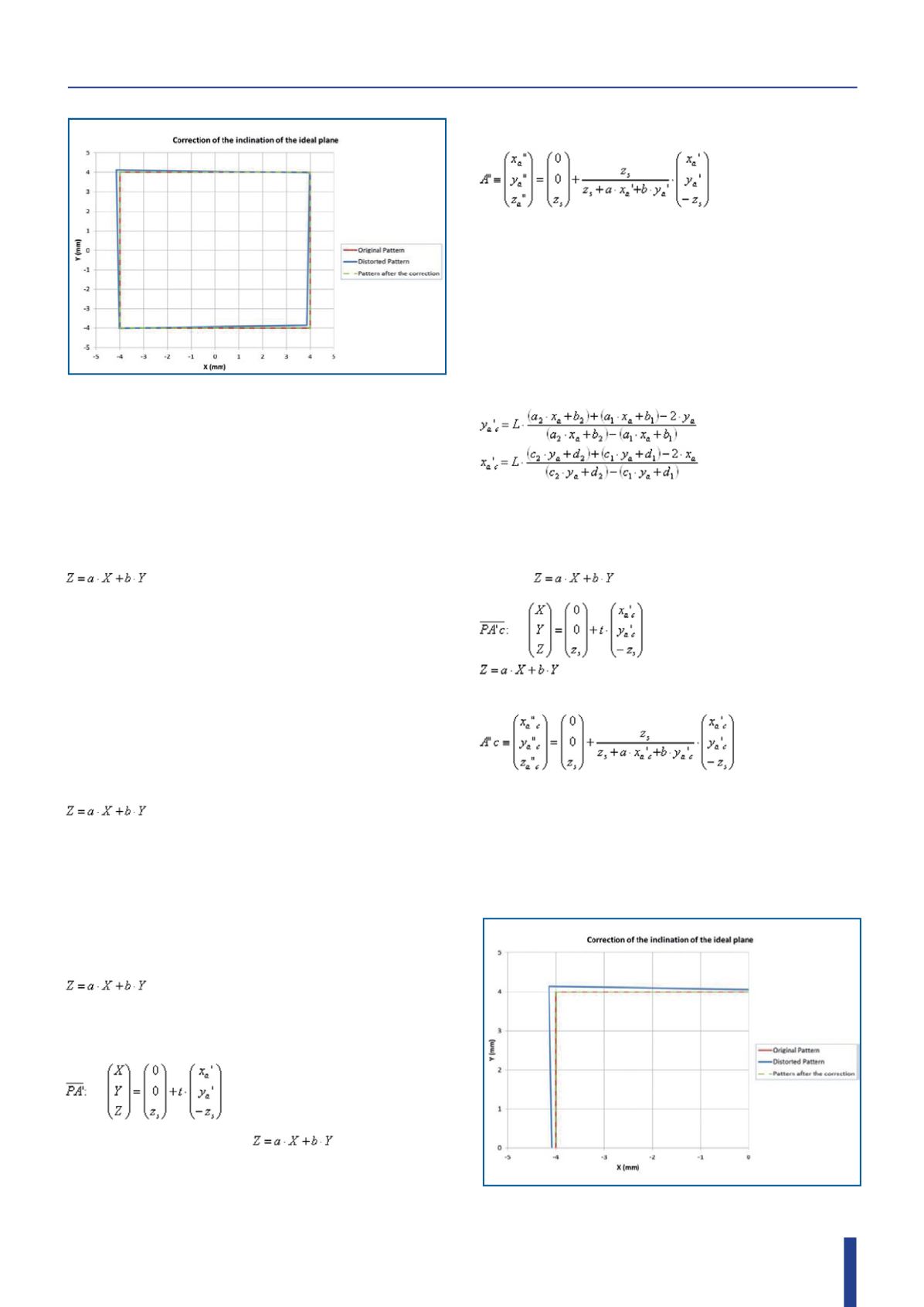
Una rappresentazione grafica di quanto descritto prima è
riportata in figura 13.
È chiaro come gli effetti di un tilt del piano di lavoro ri-
spetto all’orizzontale teorico Z=0 sono correlati alla di-
stanza del punto P dallo stesso piano (pari a Zs); infatti
nel caso limite di Zs=∞ i punti di intersezione con il piano
corrisponderanno alle proiezioni ortogona-
li degli stessi sul piano Z=0.
Algebricamente parlando (si consideri un solo punto del
quadrato per semplicità, ad esempio A’
≡
(-L ; L)):
Tale retta intercetta il piano
nel punto
La proiezione ortogonale di A” su Z=0 è quindi A ≡ (Xa” ;
Ya” ; 0). Alla stessa maniera si può procedure con i restanti
punti (B, C e D).
Una volta che tutte le coordinate sono note (in questo
esempio vengono semplicemente calcolati dal momento
che viene applicata una distorsione nota, ossia è possibile
calcolare in anticipo cosa vedrebbe la telecamera), si ap-
plica l’algoritmo di correzione descritto in questo articolo,
ottenendo:
Ancora una volta si procede allo stesso modo per gli altri
vertici del pattern (B’c, C’c and D’c).
Noti a questo punto A’c…D’c, si calcolano le coordinate
di A”c…D”c come intersezioni delle rette PA”c…PD”c con
il piano
:
ottenendo:
Il procedimento viene ripetuto per gli altri punti (B”c, C”c
and D”c).
A questo punto ci si aspetta, come risultato dell’algorit-
mo di correzione, che le proiezioni ortogonali dei punti
A”c…D”c sul piano Z = 0 coincidano con i punti iniziali
A…D, ossia:
Fig. 14 – Il risultato della correzione (tracciato
verde) è coincidente con quello desiderato (trac-
ciato rosso)
Fig. 15 – Zoomata di un dettaglio


